
Abstract
The utilization of the gyrocompass in orientation measurement applications has gained considerable significance in recent times due to its autonomy and independence from external references. This system observes and processes the Earth’s rotation rate for true north measurement. The conventional four-position static north-finding scheme is widely used in gyrocompasses for azimuth determination. However, in practice, its performance is substantially compromised in the presence of platform vibrations. Therefore, this article proposes an eight-position static scheme to address the performance limitations of gyrocompasses in vibration conditions. A comparative analysis of both schemes was performed across various platform vibration conditions and samples-per-position states. Simulation analysis highlighted that the proposed eight-position scheme demonstrated significant performance enhancements in platform vibration conditions, achieving a 34.86% improvement in accuracy under the worst vibration conditions. The findings highlighted the efficacy of the eight-position scheme in mitigating the impact of platform perturbations on gyrocompass performance, thereby improving the azimuth determination accuracy of the north finders. The results of the study emphasized the potential of the proposed scheme for practical applications where precision and reliability of the north-finding are critical.
Similar content being viewed by others

Introduction
North finders possess a wide application range in military and commercial domains such as oil-well drilling, coal mining, autonomous robots and vehicles, Kaaba (Qibla) direction systems, UAS (unmanned ariel systems), aiming of military weapons, underwater vehicles and alignment of the inertial navigation system (INS)1,2,3,4,5,6,7,8. Magnetic Compass, Astronomical observations, GNSS Satellites, and Gyrocompassing are commonly available north-finding systems. In Gyrocompassing, Earth Rotation Rate (ERR) is detected using a gyroscope along its sensitive axis. Afterwards, a Static or Dynamic north-finding method is employed to estimate the azimuth (angle from true north). The Static method measures the modulated ERR in the direction of the gyroscope sensing axis at fixed static positions of the rotation platform. In contrast, the dynamic method rotates the gyroscope at a constant platform rotation rate to measure continuously varying modulated ERR. The rotation modulation of ERR depends on the geographic latitude and angle of the sensing axis from the true north9,10,11 (Fig. 1).

Gyroscope sensitive axis and earth rotation rate.
The simplest static method comprises two positions that are ±180° from each other. This two-position scheme can effectively overcome the fixed bias of the gyroscope. However, the scale factor and other errors remain unhandled in this approach. The effect of the gyroscope scale factor can be eliminated by utilizing four positions instead of two, where each position is 90° away from the previous position12,13,14,15. Moreover, high precision north finding schemes with multi-position static method are proposed in16,17,18. As the number of positions increases, the effect of the white noise of the gyroscope caused by Angle Random Walk (ARW) is reduced, and azimuth uncertainty is improved. However, it also increases the overall north-seeking duration, increasing the effect of gyro bias drift, which is caused by the Rate Random Walk (RRW) of the gyroscope11,19. Nevertheless, implementing the multi-position scheme for higher accuracy necessitates a complex design of the rotational system and a longer north-seeking time, which makes it unsuitable for many applications where execution time is critical.
In real-world environments, numerous factors contribute to platform vibrations, which incorporate noise into the gyroscope output, ultimately diminishing the accuracy of north finders. In ideal conditions, the conventional four-position static scheme performs efficiently. However, in the presence of platform vibrations, the north-finding precision is diminished as only four points are obtained in one revolution, which leads to a low-resolution gyroscope sinusoidal output curve. For instance, If gyroscope output data at any of the positions is disturbed due to a perturbation in the rotation platform, it deteriorates the accuracy of the azimuth determined by the four-positions static scheme20,21,22,23. While utilizing a multi-position scheme in vibration conditions, balancing the number of positions and data acquisition time is challenging. If the number of positions is increased, a longer north-seeking time is required, which increases the influence of Rate Random Walk (RRW) errors on gyroscope output19. On the other hand, acquiring less data at each position to optimize the north-seeking time causes the noise to dominate, reducing the precision of the north-seeking process. Therefore, it is critical to identify an optimal number of positions to achieve a balance between data sufficiency and time efficiency, ensuring the best possible performance in real-world vibration conditions.
Therefore, increasing the number of positions requires carefully considering the north-seeking time to mitigate the effect of the platform vibrations such that the performance of the north seeker can be enhanced in the presence of platform perturbations without any significant change in north-seeking time. To achieve this goal, we propose that increasing the number of positions from four to eight with reduced samples-per-position can effectively enhance the performance of the north finder in the presence of platform perturbations. The resolution of the gyroscope output sinusoidal curve in one revolution will be doubled in the proposed scheme compared to the conventional four-position scheme. We performed simulations to analyze the effectiveness of the proposed eight-position scheme against the four-position scheme in various conditions. The accuracy comparison was conducted in five vibration conditions: zero, one, two, three, and four vibrating platform positions. For north-seeking time optimization, the experiment of accuracy comparison was repeated against three different ratios of gyroscope samples-per-position between the eight-position scheme and the four-position scheme: equal, half, and two-thirds sampling ratios.
The contributions of the article are as follows:
-
An optimized static north-finding scheme is proposed for the accuracy enhancement of the gyrocompass under vibration conditions.
-
The proposed scheme mitigates the issues of multi-position schemes in vibration conditions (noise influence and impact of RRW) by optimizing the balance between data sufficiency and time efficiency.
-
The proposed scheme overcomes the accuracy limitations of the conventional four-position scheme in vibration conditions.
-
The proposed scheme is analyzed in various vibration conditions and sampling times, and a significant reduction in Root Mean Square Error (RMSE) is achieved against the conventional scheme.
-
The article provides an effective and efficient method for accurate and reliable static north-finding in vibration conditions.
The rest of the paper is organized as follows: The next section discusses the static north finding model. After this, the simulation modelling of the experimentation is presented. The results are discussed afterwards, and the Conclusion is provided at the end.
Static north finding principle
The gyroscope is mounted on a rotation platform, and the output data containing modulated ERR are obtained for a specified time at designated positions of the rotation platform. The acquired data is processed using the static algorithm to determine the azimuth.
Fiber optic gyroscope output
The Fiber Optic Gyroscope (FOG) is an angular velocity sensor. The output of the FOG depends on the static position of its sensing axis relative to the rotation axis of the Earth. The output of the FOG at any location on Earth with latitude L is composed of the ERR components along East, North, and Up directions (Fig. 2). The component of ERR along the East direction is zero, and along the North and Up directions is given by \({\Omega }_{e}\text{cos}L\) and \({\Omega }_{e}\text{sin}L\), respectively, as shown in Fig. 3. When the sensing axis of the FOG is kept parallel to the horizontal plane, the Up component of ERR is zero. Therefore, the output of the FOG (Ω) at an angle φ from the North direction, at latitude L, while the sensing axis is parallel to the horizontal plane, is given by:
where b is the fixed bias of the gyroscope, k is the scale factor of the gyroscope, Ωe is the ERR, and δr is the random error of the gyroscope17,24,25.

Earth rotation rate and its components.

Components of ERR (a) Side view (b) Top View.
Four positions north finding
In this scheme, the output of the FOG is obtained at four distinct positions with a step angle of 90°, starting from the initial position, keeping the rotation platform in the horizontal plane as shown in Fig. 4a.

(a) Four-position (b) Eight-position north finding.
The outputs of FOG at all four positions using (1) are given by:
Ignoring the changes in FOG random error δr, we get:
From (2), it is evident that azimuth determination is independent of the gyro bias error, the scale factor error, and the latitude. However, the gyro bias drift and random errors are ignored24,26.
Eight positions north finding
The eight-position static scheme is an extension of the traditional four-position static scheme, designed to improve the accuracy of north-finding by increasing the number of measurement positions. In this method, the measurement positions of the FOG output are doubled to eight with a step angle of 45°, starting from the initial position (i.e., 0°, 45°, 90°, 135°, 180°, 225°, 270°, and 315°), and the rotation platform is kept parallel to the horizontal plane as shown in Fig. 4b.
Mathematically, the outputs of FOG at all eight positions using (1) are given by:
The least-squares estimation method11,19,27 is utilized to compute the azimuth from the acquired FOG output. Mathematically, it is given by:
such that
and
where n is 8 for the eight-position north finding scheme, and θ is the rotation angle of the platform from the first (initial) position to the i th position, i.e., θ = {0°, 45°, 90°, 135°, 180°, 225°, 270°, 315°}.
Methodology and experimentation
The simulation model of FOG was developed and utilized in experimentation to perform the accuracy comparison of four-position and eight-position static schemes in various vibration conditions.
Simulation modeling of FOG output
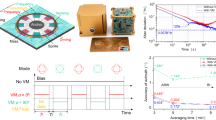
The FOG output is simulated using the imuSensor object available in the navigation toolbox of MATLAB (Matrix Laboratory) R2023b. The specification parameters of FOG ’AgileLight 710A’, from Wuxi Bewis Sensing Technology28, are utilized for gyroscope data simulation. The gyroparams class of the imusensor object in MATLAB is configured with the following reference parameters to simulate the gyroscope output.
-
Angle Random Walk (ARW) = \(8.00 \times 10^{ - 04} {}^{\circ}/\sqrt h\)
-
Bias Instability (BI) = \(8.00 \times 10^{ - 03} {}^{\circ}/h\)
-
Rate Random Walk (RRW) = \(2.90 \times 10^{ - 02} {}^{\circ}/h/\sqrt h\)
Our proposed MATLAB-based FOG data generation model is validated by comparing it with the models of Jerath et al.29 and Nunes et al.30. The specification parameters of FOG AgileLight-710A are used as reference values to generate gyroscope datasets for each model. Subsequently, the Allan variance was applied to the generated datasets to recover the reference parameters (ARW, BI, and RRW) of the FOG AgileLight-710A against each model (Fig. 5). The retrieved parameters are compared with the reference values of the specification parameters. The comparison results, as presented in Table 1, revealed that the proposed model achieved results closest to the reference values, thereby outperforming the other models. This validation confirms the accuracy and reliability of the proposed gyroscope data generation model in simulating realistic gyroscope behaviour.

Allan deviation comparison plot.
Simulation parameters
The parameters used in the simulation are listed in Table 2.
Simulation configuration and methodology
The simulation-based testing was conducted at 24 distinct reference azimuths at 15° step, starting from 0° to 345°. The gyroparams class was configured with specification parameters of the FOG to process in the imuSensor object. Bias instability, ARW, and RRW of the FOG were provided as arguments of gyroparams. In imuSensor, the type of IMU was selected as accel-gyro, the FOG sample rate was provided as 400Hz, and gyroscope parameters were given as gyroparams object. The imuSensor generated an IMU simulation model against the provided configuration.
Modulating gyroscope output
The north-seeking algorithms require FOG data at specific positions of the sensing axis on the rotation platform in the horizontal plane. The orientation of the initial position was towards the reference azimuth, and the subsequent positions were oriented from the initial position of the sensing axis. The orientation of the gyroscope sensing axis at a specific position and the value of the latitude were employed for rotation modulation of the FOG output using (1).
Adding the environmental random noise
In actual operating scenarios, the output of the FOG contains random noise due to various environmental effects such as pedestrian movement, nearby heavy machinery, and wind gusts. This random noise is considered low-frequency white noise and is modelled as a standard normal distribution. The randn function of MATLAB was used to produce a standard normal distribution for white noise generation, and its standard deviation defined the noise level. The noise level for a regular position was selected empirically to simulate the intrinsic noise of the gyroscope and set as 0.001 (standard deviation). This value was determined through iterative testing and by comparing the simulated data with the reference data of the FOG ‘AgileLight 710A’ under laboratory conditions. For disturbed positions, the standard deviation was increased fivefold (to 0.005) to simulate the impact of platform vibrations on the FOG output. This value serves as the basis for analyzing the comparative behavior of the existing and proposed static methods under disturbed conditions. The vibration level can vary under different real-world environments. However, the performance trend of the systems in 0.005 conditions provides the foundation to predict their performance under other vibration-prone conditions. Afterwards, a second-order low-pass Butterworth filter was employed to filter the noise signal at a cut-off frequency of 100 Hz, and the filtered noise signal was added to the modulated FOG output. As the sampling rate of the FOG is 400 Hz, the Nyquist frequency becomes 200 Hz (Nyquist frequency = Sampling frequency / 2). For vibration analysis, the normalized frequency of the Butterworth filter is typically set to 0.5, which corresponds to a cut-off frequency of 100 Hz (i.e., 200 Hz × 0.5). This value ensures that high-frequency noise is effectively attenuated while preserving the low-frequency components critical for simulating disturbances in gyroscope output.
Azimuths and root mean square errors
The simulated FOG outputs were collected for all required positions of respective four-position and eight-position algorithms and processed for azimuth determination using the least-squares estimation method. Ten runs of both north-finding methods (four-position and eight-position) were performed for each of the 24 reference azimuths under consideration. Subsequently, the Root-Mean-Square-Error (RMSE) was computed for the 10 runs related to each method at every reference azimuth. Consequently, 24 RMSE values were obtained for each north-finding scheme. The mean RMSE was calculated for each north-finding method based on the respective set of 24 RMSE values. From the difference of mean RMSEs, the improvement was calculated as follows:
where mRMSE4 and mRMSE8 are the mean RMSEs of the four-position and eight-position schemes, respectively.
Simulation conditions
The simulations-based testing was performed in various vibration conditions and samples-per-position states to analyze the comparative performance of the four-position and eight-position schemes.
Platform vibration conditions
The simulation-based testing was designed to evaluate the performance of both north-finding schemes in various platform vibration scenarios. Specifically, the following five vibration conditions of the platform were used: (a) No disturbed position, (b) one disturbed position, (c) two disturbed platform positions, (d) three disturbed positions, and (e) four disturbed platform positions as described in Table 3. The intentionally disturbed positions were randomly selected for both north-finding schemes in each simulation-based test. The platform disturbance was incorporated into the FOG output by amplifying the white noise signal fivefold (the standard deviation of the noise was raised from 0.001 to 0.005). The RMSEs were obtained for both north-finding schemes in each of the five platform disturbance conditions.
Samples per position states
The simulation-based testing was conducted against each of the five platform vibration conditions in the following three states of samples-per-position (Table 4).
-
Equal state: In this configuration, the FOG data acquisition time per position was set as 30 s for both schemes to ensure an equal number of samples at each position of both static schemes. Consequently, the total north-seeking time for the eight-position scheme was twice that of the four-position.
-
Half State: The FOG sampling time per position was configured as 30 s for the four-position scheme, while half of that duration (15 s) was allowed for the eight-position scheme. Therefore, in this state, the total north-seeking time was equal for both schemes.
-
Two-Thirds State: In this state, the sampling time per position remained 30 s for the four-position scheme, while the eight-position scheme was allotted two-thirds (20 s). Consequently, the total north-seeking time for the eight-position scheme is slightly increased (40 s) compared to the four-position scheme.
Rationale for relying on simulation-based validation
In this study, simulations in MATLAB were employed to analyze and validate the performance of the proposed eight-position scheme in various vibration conditions. Despite the fact that hardware-based experiments could provide data specific to real-world situations, setting up such experiments has significant challenges. A complex hardware system is required to consistently replicate the precise and controlled vibration conditions needed for experimentation. It is difficult to achieve accurate, repeatable vibration patterns in a physical setup while isolating them from other environmental factors, making it challenging to isolate the effect of platform vibrations on the gyroscope output. Such complexity could lead to unwanted variables affecting the north-finding process.
Simulations in MATLAB provide a reliable and widely used approach in the research community for modelling and analyzing complex systems. Simulations allow for precise control over the parameters, such as noise and vibrations, which enables us to concentrate exclusively on the parameters relevant to the study. Achieving such control and consistency is challenging in real-world experiments, and the simulation results precisely represent the behaviour of the tested systems. Moreover, MATLAB is well-recognized in research as a reliable tool for simulating complex systems like gyroscopes and their responses to noise and disturbances.
This study aimed to investigate the general performance trends of the proposed scheme under vibration conditions, and MATLAB simulations were highly applicable in identifying these trends. While hardware experiments may provide more specific values, the overall behaviour and trends observed in the simulations were expected to remain valid in real-world conditions. The increased precision and control of the simulation environment make it a robust tool for performance validation, suggesting that the conclusions about the comparative performance of the static schemes under various vibration conditions are reliable and relevant. This approach offers a practical alternative to physical testing while providing significant and actionable findings for improving gyrocompass accuracy in real-world environments.
Assumptions of simulation
In this study, we assumed that the environmental random noise is white and follows a standard normal distribution with low-frequency characteristics. Similarly, to emulate the effect of platform vibrations, we examined their influence on FOG data. Recognizing that the FOG output was corrupted when platform vibrations were applied, we considered this disturbance in FOG data as additional white noise. Consequently, to simulate the platform vibrations, a noise signal with an increased magnitude of the environmental noise was applied to the FOG output, which was assumed to follow a standard normal distribution with low-frequency attributes. We determined the magnitude of the noise signal by iterative testing.
It is pertinent to mention that the actual pattern or behaviour of the platform vibrations may deviate from our simulated assumption. However, the ultimate effect remains consistent: the distortion of the FOG output. Therefore, our study focused on analyzing and comparing north-finding methods (four-position and eight-position) in the context of corrupted data. Consequently, irrespective of the specific nature of the corruption or disturbance patterns, the overall outcome of the study remains consistent.
Results and discussion
The simulation results demonstrated that the proposed eight-position scheme significantly outperformed the conventional four-position scheme across all vibration conditions. This performance enhancement was particularly evident in scenarios where platform disturbances were present. Below, we discussed the results for each sampling state: Equal, Half, and Two-Thirds.
Results in equal state
The simulation results of the Equal-State are displayed in Fig. 6 and summarized in Table 5. Both schemes were configured to acquire samples for 30 seconds per position, with the total north-seeking time for the eight-position scheme being 240 seconds, compared to 120 seconds for the four-position scheme. Without platform disturbances, the eight-position scheme showed slightly improved RMSE, achieving 3.65 arcmin compared to 5.44 arcmin for the four-position scheme. As platform vibrations were introduced, the performance advantage of the eight-position scheme became more pronounced. For instance, when one random position was disturbed by increasing the white noise five-fold, the RMSE for the four-position scheme increased to 15.02 arcmin. In contrast, the eight-position scheme achieved a much lower RMSE of 7.47 arcmin, representing a 47.39% performance improvement.


Comparison plots of both north finding schemes in equal state (a) disturbed positions: Zero (b) disturbed positions: One (c) disturbed positions: Two (d) disturbed positions: Three (e) disturbed positions: Four.
Similarly, under conditions where two positions were disturbed, the RMSE values were 18.16 arcmin for the four-position scheme and 10.70 arcmin for the eight-position scheme, corresponding to an improvement of 42.85%. In the most severe vibration condition, where four random positions were disturbed, the eight-position scheme achieved a 44.31% reduction in RMSE, demonstrating its robustness against platform disturbances. The results summarized in Table 5 and the trend displayed in Fig. 7 confirmed that the eight-position scheme consistently enhances north-seeking performance under all conditions of platform disturbances.

Mean RMSEs against number of disturbed positions in equal state.
Results in half state
The simulation results for the half-state are summarized in Table 6. In this configuration, the eight-position scheme used half the number of samples per position compared to the four-position scheme, keeping the total north-seeking time equal for both schemes. Under ideal conditions, with no disturbances, both schemes performed similarly, with the four-position scheme showing a slightly better RMSE of 5.44 arcmin compared to 5.83 arcmin for the eight-position scheme. However, when platform vibrations were introduced, the advantage of the eight-position scheme became apparent. As shown in Figs. 8 and 9, with one random position disturbed, the RMSE for the four-position scheme increased significantly from 5.44 arcmin to 15.02 arcmin. In contrast, the RMSE for the eight-position scheme increased more moderately, from 5.83 arcmin to 10.23 arcmin, representing a 27.40% improvement for the eight-position scheme.

Mean RMSEs against number of disturbed positions in half state.


Comparison plots of both north finding schemes in half state (a) disturbed positions: Zero (b) disturbed positions: One (c) disturbed positions: Two (d) disturbed positions: Three (e) disturbed positions: Four.
A similar pattern was observed as the number of disturbed positions increased. In the worst-case scenario, where four positions were disturbed, the RMSE for the eight-position scheme was 20.17 arcmin, compared to 25.55 arcmin for the four-position scheme, resulting in a 15.70% reduction of RMSE. These results confirmed that the eight-position scheme is more effective and robust than the four-position scheme in the presence of platform vibrations, even when the total north-seeking time is kept constant, as illustrated in Table 6.
Results in two-thirds state
The simulation experimentation was performed in the two-thirds state, where the eight-position scheme collected two-thirds the number of samples per position compared to the four-position scheme. The results are summarized in Table 7. Under ideal conditions, with no additional disturbance, the RMSE values of both schemes were approximately equal. In the presence of platform disturbances, the eight-position scheme consistently outperformed the four-position scheme. When one random position was disturbed, the RMSE for the eight-position scheme was 8.93 arcmin, compared to 15.02 arcmin for the four-position scheme, representing a 36.61% improvement. Similarly, the eight-position scheme showed improvements of 31.89% and 28.02% for two and three disturbed positions, respectively.
In the worst-case scenario, where four positions were disturbed, the eight-position scheme achieved a 34.86% reduction in RMSE, reducing it from 25.55 arcmin to 15.75 arcmin. The trend is depicted in Figs. 10 and 11, demonstrating that the eight-position scheme enhances north-seeking performance under all disturbance conditions.


Comparison plots of both north finding schemes in two-thirds state (a) disturbed positions: Zero (b) disturbed positions: One (c) disturbed positions: Two (d) disturbed positions: Three (e) disturbed positions: Four.

Mean RMSEs against number of disturbed positions in two-thirds state.
Comparative analysis with other multi-position schemes
A thorough comparison was performed to assess the performance efficiency of the proposed eight-position static method against the four, six, and twelve-position techniques. The comparison was performed under identical conditions, maintaining uniform overall north-seeking time, and half of the positions were disturbed in each configuration. The performance comparison was performed against 24 reference azimuths with 10 runs against each azimuth, and mean RMSE was computed for each static method. The findings of the simulation-based testing demonstrate that the eight-position scheme significantly improves north-finding accuracy over the four and six-position schemes while avoiding the practical limitations associated with the twelve-position method. The eight-position method enhanced the mean RMSE by 28%, from 24.8 arcmin to 17.9 arcmin.
The six-position scheme offers a moderate improvement against the four-position method; however, it lacks the sufficient position resolution required to reduce north-seeking error significantly. The twelve-position scheme, despite its increased complexity due to the increased number of positions, yields a fractional improvement in performance compared to the eight-position scheme (17.9 arcmin to 17.1 arcmin), primarily due to the dominance of vibrational noise over the gyroscope data.
The eight-position scheme achieves an optimal balance between accuracy and north-seeking time. It offers sufficient data resolution for effective error reduction by doubling the number of measurement positions compared to the four-position scheme while maintaining the overall north-seeking duration and avoiding the impact of RRW. The comparison results are summarized in Table 8 and visualized in Fig. 12, highlighting the superior performance of the eight-position scheme.

Performance comparison of static north finding methods.
Discussion
The results achieved from the simulation-based testing emphasized that the eight-position static scheme is efficient and effective against the four-position static scheme in all disturbance conditions and time constraints. When the total north-seeking time is constant (half-state), the eight-position scheme outperforms the four-position scheme, showing better robustness against platform vibrations. This highlights the advantage of using the eight-position scheme over the four-position scheme to remain resilient to platform disturbances. In the worst-case vibration scenario, where four random positions were disturbed, the performance of the eight-position scheme in the two-thirds state showed a 34.86% reduction in RMSE, as detailed in Table 9. Increasing the sample ratio from half to two-thirds for the eight-position scheme yielded a significant performance enhancement in all vibration conditions, demonstrating its effectiveness in environments with severe platform disturbances. The comparative analysis across half, two-thirds, and equal sample ratios revealed that the eight-position scheme consistently improved performance, with RMSE improvements of 15.70%, 34.86%, and 44.31%, respectively, as shown in Table 9. This highlights the significance of the eight-position north-seeking scheme, particularly under challenging platform vibration conditions.
Therefore, for efficient north-seeking in the state of platform vibrations, the eight-position static north-seeking scheme is superior to the conventional four-position scheme, with only a slight increase in total north-seeking time. The increased number of data points collected by the eight-position scheme allows for better averaging and noise reduction, making it a practical choice for real-world applications such as military deployment, oil-well drilling, and autonomous systems, where precision and reliability are critical in vibration-prone environments.
Conclusion
This article compared and analyzed the operational viability of the four-position and eight-position static north finding schemes in various platform vibration conditions. The performance of the proposed eight-position scheme was evaluated in three different states of sampling-time-per-position (equal, half, and two-thirds) against the conventional four-position scheme. The simulation results revealed that the RMSE of the four-position scheme was greatly disturbed when platform jitters were present, even at a single position. In comparison, the eight-position scheme demonstrated a remarkable response in the presence of all platform vibration conditions. It is evident from the results that without increasing the north-seeking process time, the eight-position scheme performed better in platform jitters against the four-position scheme (half state). Moreover, if the north-seeking process time is slightly increased (the two-third state), the performance of the eight-position scheme was exceptional, i.e., 34.86% improvement. Therefore, we conclude from the RMSEs of both schemes that the eight-position static scheme is efficient and effective in the presence of platform jitters compared to the four-position scheme. Future work on actual gyroscope sensors and platform vibrations may be done to validate the findings of the simulation work by comparing both static north-finding schemes in the actual environment.
Data availability
The datasets used and/or analysed during the current study are available from the corresponding author on reasonable request.
References
Bojja, J. et al. Compact north finding system. IEEE Sens. J. 16, 2554–2563 (2016).
Wierzbicki, D. The prediction of position and orientation parameters of UAV for video imaging. In Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. - ISPRS Arch. 42, 407–413 (2017).
Chao, H., Coopmans, C., Di, L. & Chen, Y. A comparative evaluation of low-cost IMUs for unmanned autonomous systems. In 2010 IEEE Conference on Multisensor Fusion and Integration 211–216 (IEEE, 2010). https://doi.org/10.1109/MFI.2010.5604460.
Huang, J., Junginger, S., Liu, H. & Thurow, K. Indoor positioning systems of mobile robots: A review. Robotics 12, 1–28 (2023).
Liu, H. Y., Tsai, S., Tsai, M. L. & Chiang, K. W. An initial alignment method of inertial navigation system for the static state. In Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. - ISPRS Arch. 43, 227–233 (2022).
González-García, J. et al. Autonomous underwater vehicles: Localization, navigation, and communication for collaborative missions. Appl. Sci. 10, (2020).
Celikel, O. Application of the vector modulation method to the north finder capability gyroscope as a directional sensor. Meas. Sci. Technol. 22, 12 (2011).
Ariffin, N. H. & Arsad, N. MEMS gyro and accelerometer as north-finding system for bulk direction marking. IEEE Access 10, 114214–114222 (2022).
Zhou, Z., Tan, Z., Wang, X. & Wang, Z. Modified dynamic north-finding scheme with a fiber optic gyroscope. IEEE Photonics J. 10, 1–10 (2018).
Asif, G. A., Ariffin, N. H., Aziz, N. A., Mukhtar, M. H. H. & Arsad, N. True north measurement: A comprehensive review of Carouseling and Maytagging methods of gyrocompassing. Measurement 226, 114121 (2024).
Wang, Q. et al. Step angles to reduce the north-finding error caused by rate random walk with fiber optic gyroscope. Appl. Opt. 54, 8944 (2015).
Prikhodko, I. P., Zotov, S. A., Trusov, A. A. & Shkel, A. M. What is MEMS gyrocompassing? comparative analysis of maytagging and carouseling. J. Microelectromech. anical Syst. 22, 1257–1266 (2013).
Ariffin, N. H. & Arsad, N. MEMS gyroscope and accelerometer based north finding system. ARPN J. Eng. Appl. Sci. 12, 6517–6522 (2017).
Beitia, J., Fell, C., Okon, I. & Sweeney, P. Low Cost CVG for High-grade North Finders and Targeting Systems. In 2014 DGON Inert. Sensors Syst. ISS 2014 - Proc. 1–15. https://doi.org/10.1109/InertialSensors.2014.7049408 (2014).
Prikhodko, I. P., Trusov, A. A. & Shkel, A. M. North-finding with 0.004 radian precision using a silicon MEMS quadruple mass gyroscope with Q-factor of 1 million. In Proc. IEEE Int. Conf. Micro Electro Mech. Syst. 164–167. https://doi.org/10.1109/MEMSYS.2012.6170119 (2012).
Zhang, Y. et al. A novel MEMS gyro north finder design based on the rotation modulation technique. Sensors (Switzerland) 17, 22 (2017).
Luo, J. et al. Modeling and implementation of multi-position non-continuous rotation gyroscope north finder. Sensors (Switzerland) 16, 1–18 (2016).
Shen, C. W., Liu, C., Yu, S. B., Wang, Z. Q. & Li, J. R. Data processing method of multi-position strap-down north seeking system based on SVD. In Proc. 2011 Int. Conf. Mechatron. Sci. Electr. Eng. Comput. MEC 2011 994–997. https://doi.org/10.1109/MEC.2011.6025632 (2011).
He, C., Yang, C., Wang, X. & Wang, Z. Enhanced multiposition method to suppress the north finding error caused by bias drift with fiber optic gyroscopes. Appl. Opt. 52, 5303–5311 (2013).
Zhou, Z., Tan, Z., Wang, X. & Wang, Z. Experimental analysis of the dynamic north-finding method based on a fiber optic gyroscope. Appl. Opt. 56, 6504–6510 (2017).
Vau, B., Bussutil, M. & Bernard, N. An autonomous north alignment method for motion simulators. In Inert. 2023 - 10th IEEE Int. Symp. Inert. Sensors Syst. Proc. 1–4. https://doi.org/10.1109/INERTIAL56358.2023.10103977 (2023).
Ariffin, N. H., Arsad, N. & Bais, B. Low cost MEMS gyroscope and accelerometer implementation without Kalman Filter for angle estimation. In 2016 Int. Conf. Adv. Electr. Electron. Syst. Eng. ICAEES 2016 77–82. https://doi.org/10.1109/ICAEES.2016.7888013 (2017).
Mohd Sultan, J., Zani, N. H., Azuani, M., Ibrahim, S. Z. & Md Yusop, A. Analysis of Inertial Measurement Accuracy using Complementary Filter for MPU6050 Sensor. J. Kejuruter. 34, 959–964 (2022).
Duan, K., Li, D. & Pei, R. Study on the error of four-position north seeking system based on the single axis fiber optic gyroscope. Adv. Mater. Res. 503–504, 1158–1163 (2012).
Chu, Y.-Y., Wu, M.-P. & Cao, J.-L. Modeling and analysis of installation error of uniaxial gyro north finder. Int. Conf. Comput. Model. Simul. Math. Stat. (CMSMS 2018) 73–79. https://doi.org/10.12783/dtcse/cmsms2018/25186 (2018).
Zhao, X., Wang, C., Chen, J., Zhou, B. & Zhang, R. Design of miniaturized MEMS gyro north finder based on two-phase axial flux PMSM. In Conf. Rec. - IEEE Instrum. Meas. Technol. Conf. 1–6. https://doi.org/10.1109/I2MTC48687.2022.9806647 (2022).
Zhang, Z. & Liu, C. Fiber optic gyroscope dynamic north-finder algorithm modeling and analysis based on Simulink. Photon. Sens. 7, 283–288 (2017).
Wuxi Bewis Sensing Technology. Digital Closed Loop Single Axis Fibre Optic Gyroscope AgileLight-710A. https://www.bwsensing.com/details_AgileLight-710A-324.html (2024).
Jerath, K., Brennan, S. & Lagoa, C. Bridging the gap between sensor noise modeling and sensor characterization. Measurement 116, 350–366 (2018).
Nunes, G. F. S. et al. Simulation of an interferometric fiber optic gyroscope applied to a rocket model. In SIGE - Simpósio de Aplicações Operacionais em Áreas de Defesa (2022).
Acknowledgements
This research was funded by Universiti Kebangsaan Malaysia through Geran Universiti Penyelidikan (GUP-2022-027) and Dana Pecutan Penerbitan. The authors would like to extend gratitude towards Photonics Technology Research Group, Pusat Kejuruteraan Elektronik Dan Komunikasi Terkehadapan (PAKET), Faculty of Engineering and Build Environment, Universiti Kebangsaan Malaysia.
Author information
Authors and Affiliations
Contributions
G.A. Asif: Conceptualization, Methodology, Formal analysis, Investigation, Visualization, Writing—original draft preparation. N.H. Ariffin: Formal analysis, Validation, Supervision, Writing—review & editing. N. A. Aziz: Supervision, Writing – review & editing. M. H. H. Mukhtar and F. R. Asif: Writing—review & editing. A. B. Huddin: Funding acquisition. Norhana Arsad: Project administration, Funding acquisition, Resources, Methodology, Validation, Supervision, Writing—review & editing. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Asif, G.A., Ariffin, N.H., Aziz, N.A. et al. Enhanced gyrocompass performance with optimized static scheme in the presence of platform vibrations. Sci Rep 15, 16215 (2025). https://doi.org/10.1038/s41598-025-95917-8
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-95917-8
