
Abstract
To mitigate the environmental challenges posed by pollution and climate change, researchers are increasingly focused on developing highly efficient, emission-free transportation and energy systems. Electric Vehicles (EVs) implementation resolves the need for emission-free transportation, contributing to reduced air pollution and greenhouse gas emissions. Evs are utilized with advanced Brushless Direct Current (BLDC) motor for their efficiency and reliability, offering improved performance. For the purpose of decarbonized energy production, to power-up the BLDC motor, Renewable Energy Source (RES) based solar Photovoltaic (PV) system is equipped. However, to meet load demand due to insufficient DC output voltage attained from PV panels, this paper proposes a novel converter with an advanced Machine Learning (ML) based Maximum Power Point Tracking (MPPT) controller. A Quadratic Double Extended (QDE) DC-DC converter is proposed to improve voltage engendered from PV system, resulting with reduced voltage stress and improved gain. Moreover, for tracking of maximum power from PV, Sea Turtle Foraging optimized Radial Bias Function Neural Network (STFO-RBFNN) is introduced, ensuring tracking of most available power. The system incorporates supplementary sources including grid and battery to power BLDC motor of EV. The bidirectional converter together with battery enables flexible energy management by allowing for charging/discharging operations. A 3-phase Voltage Source Inverter (VSI) performs AC-DC conversion to drive the BLDC motor of EV. The simulation is done by MATLAB/Simulink and the results validate that introduced methodology significantly enhances performance, achieving improved converter efficiency (95.43%) with reduced Total Harmonic Distortion (THD) (1.14%) compared to state of art topologies.
Similar content being viewed by others

Introduction
The desire to increase fuel consumption by lowering emissions ultimately propels the development of EVs1.In the aviation sector, BLDC motor are now essential, especially for the advancement of EVs, which is ideal for propulsion systems because they have many advantages over conventional motors2. EVs reach greater speeds and longer flight times owing to BLDC motors’ excellent torque and efficiency. For powering BLDC motor, sustainable energy is highly demand3. By using renewable energy, waste and carbon emissions are reduced, clean, pollution-free renewable energy that emits minimal carbon dioxides is in greater demand4. Since PV panels have become more affordable over time, industry and researchers have used sophisticated PV modules for a variety of purposes5. The MPPT technique with a DC-DC converter topology is frequently used to optimise PV array’s capacity6.The capacity of a PV array is usually maximised when using MPPT technique with DC-DC converters7. Numerous MPPT control strategies have been considered, in a steady-state condition, these approaches face a high turnout8.This obstacle is addressed by implementing a variety of MPPT approaches with bio inspired optimisation.Metaheuristic Genetic Algorithm (GA) and Artificial Immune System (AIS) are used to overcome such nonlinear unpredictable conditions owing to complex circuitry and the appropriate specific sensor9. Nevertheless, the high population causes AIS and GA algorithms to have a low conversion rate and a long conversion time10. To improve the mutation, crossover processes are combined with computational convergence time11. The goal of the fish life-inspired FSA approach is to lessen oscillations in grade point average assessment (GMPP). The requirement for many control settings for PSO’s random accelerating value picking is a major disadvantage.Current bio inspired optimisation methods are more tracking efficient, have a high rate of convergence, and have less transients12. The glowworm optimisation method, Ant Colony (AC), Salp Swarm Algorithm (SSA), and Grey Wolf (GW) are used recently. Unfortunately, the poor conversion rate in ABC techniques because of the weather’s unpredictability and the limited supply of bees13,14. The novel STFO algorithm tuned RBFNN is a more effective method for nonlinear-based problems because of a huge nest population and a lack of contingency, despite its moderate melting rate. Because of this, a number of researchers have used this bio inspired method based on research into photovoltaic systems.

General process of distributing energy to EV motor.
To increase the low PV voltage to a higher voltage output, a DC-DC circuit with a larger step-up ratio is typically needed as demonstrated in Fig. 115. Cascade DC-DC power converters and other traditional circuits increase system complexity and cost. The traditional Fly-Back DC-DC converter topologies also contain leakage components that cause additional power losses and voltage strains on the semiconductor switches, which lowers circuit efficiency.Although the clamp circuit in the converter reduces issues with CI-based converters, it ultimately raises costs and makes the system complexity16. The Coupled Inductor (CI) converter offers reduced voltage ripple and the ability to recycle leakage energy generated in inductors17. It achieves high voltage gain and still has power leakage and lowers converter efficiency.To address these problems, a non-isolated converter is introduced in18. It helps to produce high gain but exhibits high cost due to numerous multiplier stages. The purpose of cascaded converters19 solves issues with large duty ratios. Two boost converters are connected in sequence to improve an output of PV. When compared to traditional converters, these costly devices are able to produce extremely significant voltage gains at the output at lower duty ratio values20. These converters’ low voltage stress allowed them to run at higher frequencies in their first stage, which resulted in a high power density.On the other hand, switching losses minimised by operating its second stage at lower frequencies21. The quadratic boost converter is an enhanced variant of this setup that simplified the design by reducing the number of switches to one22. Even while the cascaded boost converter generate high voltages at lower duty ratio values, its efficiency is reduced because the power handled more than once and stabilising the system required more work and intricate regulation.

Structure of the presented article.
Overview of DC-DC converters and MPPT approaches for EV applications
The conventional forms of converters deployed to improve an output voltage of solar-powered systems include buck converters, boost converters and buck-boost converters. Although boost converters are the best option, more modern DC-DC converter circuits are being created since boost converters cannot function at higher duty ratios. These changes are suggested in light of improved voltage gain performance, less switch stress, and improved control techniques, among other models23. Numerous studies on Quadratic Boost Converters (QBCs)24, achieving significant voltage gains with efficiency at manageable duty cycles exist. A Quadratic DC-DC converter is regarded as a high step-up power electronic converter achieving voltage gain proportional to the square of the duty ratio relationship. This makes it appropriate for low-voltage renewable sources like PV systems. The quadratic converter combines two boost conversion stages effectively within a single topology with the use of additional passive components. With this configuration, the output voltage increases quadratically when operating at medium duty ratios. Many structural changes have been proposed recently to boostup voltage gain and minimize overall number of components in the basic QBC. Several topological alterations in QBCs have already demonstrated their capacity to increase the load voltage, including voltage multiplier, switched inductor, switched capacitor, and magnetically coupled types25. However, an exciting input current is produced as a result of the supply side capacitor’s straight connection. Despite increase in voltage gain, these converters’ efficiency is low in high-power applications because of leakage inductance and larger passive component volumes26.A high-gain device called an interleaved DC-DC boost converter optimises the power output from photovoltaic arrays. The method achieved a voltage raise of 25 V to 400 V by significantly reducing ripple current27. Nevertheless, it is constrained by cost and system complexity issues.Voltage multiplier cells with a two-winding linked inductor to generate high-voltage gain converter that lowers the voltage stress on solar energy systems. Efficiency is increased, control is simplified, and fewer components are used in the design. Despite its effectiveness, it is rather constrained by its single-switch design, which affects scalability in higher-power applications. Additionally, more testing is necessary for range of load scenarios. Various models for tracking highest energy from solar is summarized in Table 1 with the proposed solution.
The above survey clearly portrays that several problems exist in literature works. Traditional converters face issues in providing high voltage gain at low duty cycles and exhibit reduced efficiency specifically at high-power operating conditions of EV. Even though cascaded, interleaved and couple-inductor based converters improve gain, they exhibit high complexity and control difficulty. Subsequently, existing MPPT approaches face restrictions like slow convergence, steady-state oscillation and poor real-time adaptability. They are also sensitive to tuning of parameters and show degraded performance. Also, few of the existing algorithms fail to assure low harmonic distortion and stable DC-link voltage. These issues suggest the need of an improved system integrating a high-efficient DC-DC converter along with an intelligent MPPT strategy. The structure of the presented article is provided in Fig. 2.
Major contributions/Novelties.
-
1)
Solar based EV- A solar PV-based energy supply system is designed to power a BLDC motor-driven EV, promoting clean, emission-free transportation.
-
2)
DC-DC converter-To increase the PV output voltage with better gain and less voltage stress, a novel QDE DC-DC converter is deployed, guaranteeing adequate power delivery to satisfy EV load demands.
-
3)
Novel MPPT model-The STFO-RBFNN based MPPT technique provides quick and precise power tracking under dynamic environmental situations with superior tracking accuracy.
-
4)
Energy Management system-A hybrid system integrating grid and battery, enabling smooth switching and power balancing for BLDC motor by intaking excess amount of energy from PV module.
-
5)
Speed control of EV motor-The BLDC motor in EV is controlled by PI controller, which ensures accurate and seamless operation across a range of load and environmental circumstances.
Proposed system model
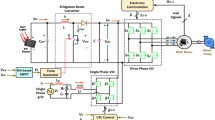
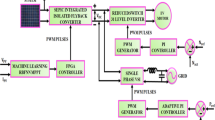
A thorough smart energy management framework for EVs, powered by renewable energy system is depicted in Fig. 3. A quadratic double extended converter boost the energy produced by PV panel, which effectively increases the PV voltage. Also an intelligent STFOA-optimized RBFNN based MPPT method deployed for optimizing voltage and current produced by PV module to extract the most power possible. After being fed into a DC bus, the regulated DC output is transformed into AC power by a Three-Phase VSI, which then powers BLDC motor. Through a PI controller, EV motor speed is controlled by comparing reference speedwith actual speed.

Block diagram representation of proposed EV motor.
In order to facilitate bidirectional power flow and enable both charging and vehicle-to-grid (V2G) operation, the system simultaneously communicates with the grid through a second Three-Phase VSI. Real (P) and reactive (Q) power exchange is monitored and controlled by a PI controller.The battery storage system is linked to DC bus via a bi-directional DC-DC converter, which enables effective energy transfer during both the charging and discharging phases. A PWM generator and PI controller regulate its operation, guaranteeing power balancing according to battery energy needs. Overall these energy management models has an effective capability of sending an essential energy to BLDC motor.
PV model
Figure 4 depicts a PV cell’s equivalent circuit. PVcell’s essentially acts as a current providing device, one anti-parallel diodes and two resistances (\({R}_{sh},{R}_{se}\)) are the main parts of a single diode model.

Circuit model of PV characteristics.
The definition of the output current is,
Where \(V\) stands for photovoltaic cell’s terminal voltage and \(i\)refers output current, \({i}_{p}\) indicates current the PV cell produces as a result of irradiance. The current values at which diodeis denoted by\({i}_{d}\), respectively, whereas \(G\) and \({G}_{N}\)represent irradiance. The values of diodes’ respective thermal voltage constants are denoted by\({V}_{T1},{V}_{T2}\). The short circuit current (\({k}_{i}\)) and open circuit voltage (\({k}_{v}\)) are constants respectively.
Quadratic double extended DC-DC converter
The proposed quadratic double extended is a type of DC-DC converter, which ultimately performs boosting of minimal energy from PV system. The main novelty of the proposed converter lies in the incorporation of dual extended boosting stages around a single quadratic core with the use of diodes and inductors. This enables the amplification of quadratic voltage with the repeated processing of power adopting a reduced set of inductors, capacitors and diodes. In conventional cascaded or quadratic boost converters, multiple boost stages are connected sequentially in which the output of one stage becomes the input of next. In the proposed converter, the energy is redistributed temporally across the extended paths which in turn enable the voltage gain to increase quadratically corresponding to the duty cycle. The voltage regulation and duty ratio control is more flexible by the inclusion of two actively controlled switches which in turn improves efficiency and dynamic response under varying scenarios. The quadratic extended converter diagram introduced in this paper is displayed in Fig. 5. An input inducer (\({L}_{1})\), one input diode (\({D}_{1})\) and capacitor (\({C}_{1})\), make up the power circuit. They each have an inductor (\({L}_{2},{L}_{3}\)), a capacitor (\({C}_{o}\)), and diodes (\({D}_{2},{D}_{3}\)), respectively. Lastly, two power switches\({S}_{1},{S}_{2}\) are included to guarantee the ability to regulate voltage and operate as a boost, correspondingly.

Circuit configuration of proposed QDE converter.
Operational model in steady state analysis
Three distinct continuous conduction mode (CCM) operation modes are made for the converter under investigation, contingent on the state of two switches. The three stationary operating modes are depicted in detail in the following Fig. 6, where the current flow directions in the various channels are coloured to aid in comprehension of the converter’s working principle.

Switching state of four operating modes of converter.
Mode 1 (\({\mathbf{S}}_{1}-\mathbf{O}\mathbf{N}\mathbf{a}\mathbf{n}\mathbf{d}{\mathbf{S}}_{2}-\mathbf{O}\mathbf{F}\mathbf{F})\)
The input diode \({D}_{1}\)is turned off during this operating mode. Additionally, the input capacitor\({C}_{1}\) is in charging mode during this mode and the input inducer \({L}_{1}\) releases the energy that is stored. Because of the reverse voltage created over \({D}_{2}\) by the inductor \({L}_{2}\) charging and the capacitor \({C}_{o}\) discharging and power the load as seen in Fig. 7(a).
Mode 2(\({\mathbf{S}}_{1}-\mathbf{O}\mathbf{F}\mathbf{F}\mathbf{a}\mathbf{n}\mathbf{d}{\mathbf{S}}_{2}-\mathbf{O}\mathbf{F}\mathbf{F})\)
While \({D}_{1}\) is still off, \({L}_{1}\) is still discharging and \({C}_{1}\) is in charging mode, just like in the prior functioning state. Since both inductors, \({L}_{2},{L}_{3}\)are releasing the stored energy over\({C}_{o}\), respectively. Both \({D}_{2},{D}_{3}\) are now turned ON as illustrated in Fig. 7(b).

Operating modes (a) Stage 1 (b) Stage 2 and (c) Stage 3.
Mode 3: (\({\mathbf{S}}_{1}-\mathbf{O}\mathbf{F}\mathbf{F}\mathbf{a}\mathbf{n}\mathbf{d}{\mathbf{S}}_{2}-\mathbf{O}\mathbf{N})\):In this mode of operation, \({D}_{1}\) turns ON once the switch \({\varvec{S}}_{2}\) is turned ON. As a result, over the energy-storing inducer\({L}_{3}\), \({L}_{1}\) is charging, \({C}_{1}\) is discharging. While\({D}_{3}\) reverse-biases and shuts off. \({D}_{2}\)Switches ON in the opposite direction to discharge the energy that has built up across \({L}_{2}\)into\({C}_{o}\).
Table 2 shows the maximum voltage stress over \({S}_{1},{S}_{2}\)is \({V}_{C1}\) and \({V}_{C1}+{V}_{Co}\) respectively.The following voltage relationships for each inductor id established in this manner. The volt-second relationship of \({L}_{1},{L}_{2},{L}_{3}\), as shown in Eq. (4) to (6), is deployed assuming perfect components and considering one switching cycle.
The voltage equations mentioned below, from (7) to (9), is established by equalising and solving Eq. (4) to (6) to each capacitor voltage,\({\delta}_{2}+{\delta}_{3}=(1-{\delta}_{1}\)) and (\({\delta}_{1}+{\delta}_{3}\)) = \((1-{\delta}_{3})\) as well as\({\delta}_{1}={\delta}_{3}=\delta\).
The expression that describes voltage gain of proposed converter Eq. (10) is established by equalising Eq. (7) to Eq. (9) to \({V}_{in}\) and\({V}_{o}={V}_{C1}+{V}_{Co}\),
Design of components.
This section describe and explain the full design process for passive components utilised in proposed experimental prototype.
Design of Capacitors.
The generic expression used to specify the minimum capacitance value for the capacitor design is expressed in Eq. (11).
Where \({iC}_{max}\) refers maximum current passing through the capacitor, \(\delta\) refers maximum duty cycle for the converter, \({f}_{PWM}\) indicates converter’s switching frequency and \({\varDelta{v}}_{C}\) indicates maximum voltage variation (ripple) produced by the capacitor. The input voltage, output power and efficiency used to determine the input current, which is required for the input capacitor.
Design of inductors.
The generic expression used to specify minimum inductance value for an inductor design is shown in Eq. (13).
The converter’s switching frequency is\({f}_{PWM}\), maximum duty cycle is denoted as\(\delta\),maximum voltage provided to the inductor is referred as\({V}_{Lmax}\),and the maximum desirable current ripples in inductor is specified as \(\varDelta{i}_{L}\). This equation is applied to input inductor, \({L}_{1}\) that shown below.
Considering ripple margin and safe operation, the value is rounded to \({L}_{1}=45{\mu}H\).
The subsequent formula is applied to the remaining inductors\({L}_{2},{L}_{3}\),
Considering component standardization, \({L}_{2}={L}_{3}=45{\mu}H\)
Considering the design considerations, the duty ratio selection is crucial since it directly influences the quadratic voltage gain and assures operation away from extreme duty cycles for avoiding instability and excessive losses. The inductor values are designed for maintaining CCM under rated and dynamic load conditions, limiting current ripple and preventing core saturation. The selection of capacitor values depends on allowable voltage ripple, switching frequency and load power demand for assuring stable voltage and energy buffering. Maximum voltage stress and current ratings are considered for the selection of power semiconductor devices. Subsequently, the selection of switching frequency denotes a trade-off between reducing switching losses and minimizing passive component size. The effectiveness of proposed converter is highly enhanced by generating sufficient level of energy to BLDC motor with outstanding conversion efficiency. Additionally, the MPPT model is implemented for extracting higher amount of energy from PV, thereby the converter performance also improved.
Seat turtle foraging optimized RBFNN-MPPT
RBFNN
Solar systems require MPPT model to extract their highest amount of power under various temperature conditions. Three layers normally make up an RBFN such asan input layer, a hidden layer and an output layer, as seen in Fig. 8.The output layer is linear, whereas the hidden layer has a non-linear vector-based activation function. The inputs are transmitted to hidden layer via nodes in input layer. The input neuron’s net input and output are shown as,
Where, input layer \({x}_{i}^{\left(1\right)}\) represented by\(i\), hidden layer by \({y}_{\left(n\right)}^{\left(1\right)}\)by \(i\) and input layer total by \({net}_{i}^{\left(1\right)}\)by \(i\).The hidden layer’s nodes all execute the Gaussian function.In the RBF, the Gaussian function is employed as a membership function.
Where, Gaussian function’s mean and standard deviation are denoted as\(\sum_{j}.\)a single node\(k\) in an output layer produces the linear control signal (D).
Where,\({w}_{j}\)refers matrix of connective weights between the hidden layer and output. This study uses the solar cell’s voltage and current as inputs to RBFN controller, which outputs duty cycle (D) as illustrated in Fig. 8. Furthermore, the tracking performance of RBFNN model is also boosted with the help of sea turtle foraging algorithm.

Layers of RBFNN based MPPT.
Sea turtle foraging algorithm
This new nature-inspired metaheuristic algorithm imitates the migratory and solitary foraging habits of sea turtles. When searching for food sources like seagrass, algae and phytoplankton, sea turtles travel great distances across the ocean. Dimethyl sulphide (DMS), a volatile substance released by these food sources, builds up above the water surface and directs turtles towards areas that are abundant in prey.A solution space is explored and exploited through the computational modelling of this behaviour. The RBFNN parametersare tuned in the proposed work using STFA, where each turtle stands for a potential solution in a two-dimensional search space.
Initialization-Initialise the locations of \(N\) sea turtles at random in a dimensional search space D:
Set each turtle’s initial velocity at random,
Each dimension’s velocity is constrained by,
Food source generation-Create \(M\) food sources at random within the search area.
Fitness Evaluation
Determine each turtle’s fitness \({T}_{i}\left(t\right)\)using a control performance metric, ITAE.
Ocean Current effect
Determine the velocity of ocean current affecting turtle,
Update the velocity based on past movement and present influence,

Stepwise process of proposed STFO-RBFNN based MPPT model.
Odor strength calculations-Determine DMS odour strength from food source \(j\) as perceived by turtle\(i\),
Here, \({d}_{i,j}={\parallel{T}}_{i}\left(t\right)-{K}_{j}\parallel\) refers Euclidean distance and \(\sigma\left(t\right)={\sigma}_{0}{e}^{-\raisebox{1ex}{$t$}\!\left/\!\raisebox{-1ex}{$T$}\right.}\) indicates odour spread range control.
Food source selection
Determine the turtle’s ideal food source (\(J\)) for\(i\) as,
Position update
Update each turtle’s location,
Stopping criteria
When a maximum number of iterations or a sufficient error threshold is reached, stop the algorithm. If not, the iteration keeps continues as displayed in Fig. 9. The food sources are periodically changed according to the following,
Overall, the proficiency of RBFNN is enhanced by tuning its parameters with the assistance of sea turtle algorithm, thereby tracking of highest power from PV module is improved. On the other hand, the battery act as an energy management system in this model, which stores energy when PV module generate excess energy and gets manage by the bidirectional converter as discussed below.
Energy management system
Battery with bidirectional converter
Boost and buck converters are fused to introduce bidirectional DC-DC converter. The battery is charged and discharged by using this converter36, which operating mode is illustrated in Fig. 10.

Bidirectional converter for battery model.
(a) Boost mode-When battery storage discharges, the boost mode is used. In this phase, an inducer current flowing from lower voltage side to higher voltage side. The following formula is used to determine the current\({i}_{L}\)and \({V}_{DC}\), in a CCM of operation.
(b) Buck mode: The boost mode is employed when the battery storage is being depleted. In the illustration, the inducer current flows throughconverter circuit when it is in boost mode. In CCM operation, \({i}_{L}\) and \({V}_{DC}\) is found using the following formula,
The system of equations according to analysis of these mode configurations are,
Here, \(\left({V}_{B},{i}_{B}\right)\) is the input quantity and (\({V}_{DC},{i}_{B-m}\)) is the output quantity. As a consequence, the battery supply energy to BLDC motor in the period of requirement duration.
Three phase grid system.
The proposed energy management system’s grid integration allows for reliable and adaptable power exchange between the utility supply and EVs. Bidirectional power flow is supported by the system using three-phase VSI, enabling both system-to-grid functions including vehicle-to-grid (V2G) energy return and grid-to-system charging. By comparing reference active and reactive power values with their real equivalents, a PI controller keeps track of and regulates this interaction. For the VSI to efficiently control the power flow, the control loop produces the PWM signals that are required.This dynamic coordination guarantees that the system draw electricity from grid when solar availability is low or load needs are high, and return surplus renewable energy to the grid during times of surplus generation. In the end, this interaction promotes a more robust and energy-efficient EV infrastructure by improving grid stability, supporting reactive power compensation and aiding in load balancing.
Three phase BLDC motor
One kind of synchronous electric motor that runs on DC is the BLDC motor shown in Fig. 11, which regulates the winding flow via an electronic communication system. Higher efficiency, improved speed torque and a longer lifespan are the benefits of this converter. This procedure keeps stator and rotor in sync and produce back EMF in windings to identify rotor position. Equation (36) provides an illustration of the BLDC model.
Here,\(M\) denotes mutual inductance across the phases,\(V\) stands for phase voltage, \(S\) refers Laplace operator and \(L\) indicates self-inductance.

Three phase BLDC motor equivalent circuit model.
Substituting Eq. (39) into (36), the expression is shown as,
The BLDC motor’s torque is calculated as,
In this case, \({\omega}_{m}\) refers the motor’s rotation speed. Additionally, the PI controller controls the motor to regulate the speed, thereby the performance of motor in EV applications is enhanced.
Results and discussion
The performance analysis of proposed model is described in this section, which gets evaluated in MATLAB/Simulink and hardware analysis. Finally, for proving the obtained outcomes, it is compared with the other utilized models in recent years. Following Table 3 indicates the specification value of PV, converter, BLDC motor and battery model.
Case 1: PV under steady state condition

PV under Constant Condition (Case 1).
The developed system is first examined under constant temperature and intensity condition, shown in Fig. 12. To be noted that, the temperature is constantly maintained at \({\text{3}}{{\text{2}}^ \circ }C\) with intensity maintained at\(1000\text{W}/{\text{m}}^{2}\). For this condition, the PV panel response along with developed converter outcomes are attained which is present in Fig. 13.

Input/Output Characteristics under Case 2.
For the given temperature and intensity, the PV panel voltage is noticed to be continued at 405 V with slight variations. While the current waveform demonstrates oscillations at the starting, however tends to manage a current value of 89 A, after 0.1s. In correspondence, the proposed QDX converter shows boosted voltage measuring about 800 V in assistance with the support of developed STFO-RBFNN MPPT algorithm. Meanwhile, the current waveform, shows slighter oscillating current value of 43 A as displayed in Fig. 13.

Power Characteristics Waveform (Case 1).
The input power of PV and output power of converter is presented in Fig. 14. It is noticed that, under scenario 1 the power from PV is noticed to be maintained at 36,045 W, with the corresponding converter output power is 34,400 W.

Battery Characteristics Waveform.
The characteristics of battery is illustrated in Fig. 15. It is noted that, the voltage of battery is maintained at 450 V, with current waveform showing the charging condition. At this instance, the battery state of charge is noticed to be 80%, respectively.

BLDC Motor Performance under Case 1.
Under the condition of PV powering motor, the characteristics of BLDC motor is presented in Fig. 16. The motor current and torque waveform shows spike at the initial stage after continues at steady level owing to effective motor control. Moreover, the back EMF shows smoother operation ensuring improved performance of motor. Correspondingly the speed of BLDC motor is noticed to be maintained at 2500RPM, with stabilization owing to effective control.

Grid Characteristics Waveform under Case 1.
The voltage and current waveform of grid is presented in Fig. 17. It is noticed that, a stabilized grid voltage and current of 315 V and 25 A is maintained indicating effective grid synchronization.

Three Phase Real and Reactive Power Waveform.
The system demonstrates stabilized real and reactive power as shown in Fig. 18. Effective power regulation is indicated by the real power waveform’s initial transient peak, which stabilizes after 0.05s. Improved power factor and limited reactive power flow is confirmed by reactive power’s initial fluctuations before settling close to zero.
Case 2: Converter response under varying temperature and intensity

PV Behaviour under Changing Characteristics under Case 2.
The performance of PV under changing condition of PV is presented in Fig. 19. The temperature is initially at\({\text{2}}{{\text{5}}^ \circ }C\), after 0.35s it increases to\({\text{3}}{{\text{2}}^ \circ }C\). Meanwhile, intensity level is maintained at \(900W/{m}^{2}\) after 0.4s, the intensity level increases and continues at\(1000W/{m}^{2}\). Based on the scenario, the PV and converter performance is demonstrated in Fig. 20.

Input/Output Characteristics under Case 2.
Under changing temperature and intensity condition, the PV panel and the corresponding converter performance is presented in Fig. 20. It is noticed that, heavy oscillations occurs at the initial stage and sustains till 0.3s, after continues at 405 V. In accordance, the current waveform shows a stabilized value after 0.43s with 89 A. The converter responses with boosted voltage measuring about 800 V, in assistance with STFO-RBFNN MPPT, while the current waveform demonstrates 43 A, respectively.
Case 3: Battery powering the motor due to pv system shut down at 0.35s

PV Behaviour under Cut-Off Scenario.
In order to determine the proposed system performance, the system is examined under shut down of PV, shown in Fig. 21. It is seen that, till 0.35s, the system gets powered using PV with 405Vafter owing to shut down condition, the voltage falls down. Likewise, the PV current is maintained at 89 A, with initial oscillations, after 0.35s drops down representing the cut-off condition of PV.

Battery Powering the Motor (Case 2).
Owing to cut of scenario of PV, in this case the motor gets powered utilizing battery, the corresponding waveforms are presented in Fig. 22. Initial steady voltage and current in battery indicates the charging condition. After 0.35, owing the change is power from PV to battery, the waveform starts oscillating, however, results with voltage level of 405 V, with current approximately 43 A revealing discharging condition.

DC Link Voltage at PV Cut of Condition.
Under cut of scenario of PV and battery powering the load the DC link voltage is presented in Fig. 23. It is seen that, stabilized voltage of 800 V indicates that the supply is attained from PV after 0.35 oscillating voltage is accomplished owing to exchange of energy from PV to battery.

BLDC Motor Powered by Battery.
The waveform presenting BLDC motor performance after cut off condition of PV at 0.35s, is presented in Fig. 24. To be noted that, compensating the voltage in this case battery take the responsibility of powering the BLDC motor. However, the motor shows smoother performance with minimized torque and current, followed by improved torque response. The BLDC motor speed is observed to be continued at 2500RPM without any oscillations.
Case 4: PV system shuts down at 0.35s with grid powering motor

PV Characteristics (Case 3).
The characteristics of PV under shut down condition at 0.35s, is presented in Fig. 25. In this scenario, the voltage and current of PV is initially maintained at a value of 405 V and 89 A till 0.5s. After, owing to cut of condition of PV the behaviour of PV drops down. Under this scenario, the grid powers the motor. The corresponding grid waveforms are presented in Fig. 26.

Grid Powering the Motor.
The characteristics of grid waveform under PV drop down scenario at 0.35s is demonstrated in Fig. 26. It is seen that, a stabilized voltage of 315 V, with current 25 A, is maintained. Minor oscillations at 0.35s is due to exchange of energy from PV to grid.

BLDC Motor Powered by Grid.
The characteristics of BLDC motor under the condition of grid powering with cut of condition of PV at 0.35s, is presented in Fig. 27. The BLDC motor continues to provide smoother operation with lower current ripples and torque. Furthermore, the BLDC motor shows improved EMF performance with speed maintaining at a constant level of 2500RPM, respectively.

THD Waveform of proposed model.
The THD Waveform for three phase grid system is presented in Fig. 28. It is seen that, a reduced THD value of 2.59%, 1.50% and 1.14% is accomplished by the R, Y and B-phase. Moreover, the THD values lies within the IEEE standard indicating effective grid synchronization.
Hardware analysis
The experimental prototype for RES based BLDC motor performance with effective energy management is presented. The setup is designed with QDX DC-DC converter and a FPGA controller programmed with STFO-RBFNN MPPT for effective energy management shown in Fig. 29. The system presented ensure uninterrupted supply for motor by utilizing grid and battery as back up option. The system is tested under changing condition of temperature and intensity and the resultant waveform attained from Digital Storage Oscilloscope (DSO) is also presented in this section.

Hardware Prototype.

Converter Input/Output Voltage Characteristics.
In the scenario of varying temperature and intensity is presented in Fig. 30. It is seen that the voltage from PV is noticed to be maintained at 405 V with initial oscillations owing to variations in PV behaviour. In correspondence, the proposed QDX-DC-DC converter shows boosted voltage measuring about 800 V together in assistance with STFO-RBFNN MPPT.

DC-Link Voltage and Battery Characteristics.
The characteristics of DC-Link voltage and battery is in Fig. 31. It is seen that, under PV powering the BLDC motor, the DC link continues to offer 800 V together in assistance with the support of STFO-RBFNN MPPT. Moreover, the battery shows improved voltage of 450 V, indicating effective charging.

BLDC Motor Characteristics Waveform.
The BLDC motor performance is presented through the speed, current and torque waveform shown in Fig. 32. It is seen that, the speed of motor is noticed to be preserved at 2500RPM with initial variations owing to transient response. Followed by reduced torque and current ripples representing improved performance of BLDC motor.

Three Phase Grid Waveform.
The voltage and current characteristic of grid is presented in Fig. 33. It is seen that a pure sinusoidal voltage of 315 V is accomplished with current maintaining at reduced level. This pure sinusoidal outcomes demonstrates that the proposed system accomplishes effective grid synchronization with minimized harmonics.

Grid Current THD Waveform.
The amount harmonics presented in proposed system is illustrated through THD waveform of grid. It is seen that, a minimal THD value is accomplished by all the three phases maintaining 2.54% by R-Phase, 2.11% by Y-Phase and 2.08% by B-Phase in Fig. 34, respectively.
The converter components proposed model is compared with the other referred models displayed in Table 4. This showing that higher improvement of minimal stress is attained by the proposed double extended DC-DC converter.

Voltage gain comparison over various converters and proposed Efficiency with voltage gain curve.
The voltage gain comparison for the proposed model with SIDO QBC, HGQBC and IQBC converters25,39,40 displayed in Fig. 35. The proposed approach clearly yields a much larger voltage gain at lower duty cycles, which suggests improved efficiency and less switching stress.The voltage gain and efficiency of introduced converter are contrasted over various duty cycles. It shows that the efficiency peaks at 95.43%, identifies the ideal operating range for attaining high efficiency and voltage gain.
Loss calculation.
-
Switching losses (\({S}_{1}\) and \({S}_{2}\)), \({P}_{sw}=\frac{1}{2}VI\left({t}_{on}+{t}_{off}\right){f}_{s}=52.8W\) per switch.
For two switches \({P}_{sw}\approx106W\).
-
Switch conduction losses, \({P}_{cond,sw}={I}_{rms}^{2}{R}_{DS\left(on\right)}=16W\) per switch.
For two switches \({P}_{cond,sw}\approx32W\).
-
Diode conduction losses, \({P}_{D}={I}_{avg}{V}_{f}=22.5W\) per diode.
For three diodes, \({P}_{D}\approx68W\)
-
Inductor losses, \({P}_{inductors,total}=44W\)
-
Capacitor ESR losses, \({P}_{C}={I}_{rms}^{2}{\times}ESR=2W\)(each)
For two capacitors \({P}_{C}=4W\).
-
Control and miscellaneous losses, \({P}_{misc}\approx11W\)
-
Total loss\(\approx457W\).
STOA-RBFNN based MPPT model is compared with other recently deployed strategies for indicating the outstanding performance. Table 5 illustrates that tracking efficiency and ripple are better compared to the others indicatingvalues of 98.75% and 0.13 respectively.

Fitness curve of proposed STFO algorithm with existing ones.
The optimisation process’s fitness convergence curve over 200 generations is shown in Fig. 36. The STFO model successfully converges to a near-optimal solution within a brief iteration span, as seen by the fitness value’s quick decline in the first few generations and stabilisation at 0.35. All of these findings support the proposed method’s better performance and quicker convergence.
Converter efficiency in simulation, \(\eta\left(\%\right)=\frac{{V}_{out}\times{I}_{out}}{{V}_{in}\times{I}_{in}}\times100=\frac{800\times43}{405\times89}\times100=95.43\%\)
Converter efficiency in hardware, \(\eta\left(\%\right)=\frac{{V}_{out}\times{I}_{out}}{{V}_{in}\times{I}_{in}}\times100=\frac{800\times40.4}{405\times85}\times100=93.8\%\)
Table 6 provides the comparison of simulation and hardware outcomes in which the efficiency of the converter is hardware outcomes is slightly lower when compared to simulation outcomes. This is due to the real-world factors and thermal effects which are not fully captured during simulation. The influence of non-ideal components leads to a marginal increase in hardware THD values. The tracking efficiency exhibits a small reduction from 98.75% in simulation to 96.93% in hardware. The ripple value shows a slight increase in hardware due to practical limitations.
In spite of the attained outcomes, the real-time implementation of the proposed concept faces certain challenges. The intelligent controller needs sufficient computational resources and high-speed digital processors for assuring fast convergence along with stable operation specifically at times of rapid variation scenarios. Added to this, coordination of multiple power paths increases control complexity and hence accurate synchronization is needed for avoiding transient oscillations. During dynamic conditions, the proposed system maintains superior performance due to its adaptive learning ability but requires robust real-time validation for assuring consistency efficiency.
Conclusion
This work addresses the dual issues of climate change and environmental pollution by proposing an efficient QDE DC-DC converter with optimized MPPT framework for EV drive systems. A QDEDC-DC converter provides decreased system component stress and increased voltage gain with enhanced efficiency. Furthermore, robust RBFNN controller based on STFO algorithm guarantees optimal energy harvesting under a variety of environmental conditions with better tracking accuracy.A bidirectional converter controls the battery support mechanism, which enables flexible charging and discharging. Also, the energy management is highly accomplished by incorporating o battery and grid system, which proficiently distribute energy to EV motor in the peak period. The proposed model outperforms traditional topologies with high efficiency (95.43%) and much lower THD (1.14%), according to simulation findings using MATLAB/Simulink. These outcomes validate the potential ofproposed approach to advance high-performance, emission-free, renewable energy-powered EV technology. However, the performance of the converter under extereme operating conditions like component parameter drift, wide temperature variations, electromagnetic interference and aging effects is not investigated. Also, the coordinated control demands improved protection and fault-handling mechanisms, these limitations can be addressed in future works.
Data availability
Data is available on request from the authors.
References
Radhakrishnan, R. K., Marimuthu, U., Balachandran, P. K., Shukry, A. M. & Senjyu, T. An intensified marine predator algorithm (MPA) for designing a solar-powered BLDC motor used in EV systems. Sustainability 14 (21), 14120 (2022).
Prakash, S. & Boopathy, K. High speed BLDC motor for grid tied PV based EV system using hybrid PSO-spotted hyena optimized PI controller. Int. J. Appl. 13 (3), 768–782 (2024).
Bharathi, M. L. Extraction of maximum power from solar with BLDC motor driven electric vehicles based HHO algorithm. Adv. Eng. Softw. 170, 103137 (2022).
Anand, V. et al. Optimized PV-based induction motor drive for electric vehicle system with bidirectional converter: modeling and analysis. (2024).
Kavin, K. S. & Subha Karuvelam, P. PV-based grid interactive PMBLDC electric vehicle with high gain interleaved DC-DC SEPIC Converter. IETE J. Res. 69(7), 4791–4805 (2023).
Inbamani, A., Umapathy, P., Chinnasamy, K., Veerasamy, V. & Kumar, S. V. Artificial intelligence and Internet of things for renewable energy systems. In Artificial Intelligence and Internet of Things for Renewable Energy Systems Vol. 12 (2021).
John, I. S., Abdulkarim, A. & Olarinoye, G. A. Maximum power point tracking of a partially shaded solar photovoltaic system using a modified firefly algorithm-based controller. J. Electr. Syst. Inf. Technol. 10(1), 48 (2023).
Gulzar, M. M. Maximum power point tracking of a grid connected PV based fuel cell system using optimal control technique. Sustainability 15 (5), 3980 (2023).
Ayaz, R. Self-tuning parameters of the proposed fuzzy immune integral controller to improve the performance of the standard P&O-MPPT strategy (IEEE Access, 2024).
Inbamani, A. & Prabha, S. U. Predicting the Single Diode Model Parameters using Machine Learning Model. Electr. Power Compon. Syst. 51 (14), 1385–1397 (2023).
Eltamaly, A. M., Farh, H. M. & Abokhalil, A. G. A novel PSO strategy for improving dynamic change partial shading photovoltaic maximum power point tracker. Energy Sources Part A Recover. Util. Environ. Eff. 46(1), 8736–8750 (2024).
Huang, K. H., Chao, K. H. & Lee, T. W. An improved photovoltaic module array global maximum power tracker combining a genetic algorithm and ant colony optimization. Technologies 11 (2), 61 (2023).
Dagal, I., Akın, B. & Akboy, E. Improved salp swarm algorithm based on particle swarm optimization for maximum power point tracking of optimal photovoltaic systems. Int. J. Energy Res. 46 (7), 8742–8759 (2022).
Gundogdu, H., Demirci, A., Tercan, S. M. & Cali, U. A novel improved grey wolf algorithm based global maximum power point tracker method considering partial shading. Ieee Access 12, 6148–6159 (2024).
Abbasi, M., Abbasi, E., Li, L. & Tousi, B. Design and analysis of a high-gain step-up/down modular DC–DC converter with continuous input current and decreased voltage stress on power switches and switched-capacitors. Sustainability 13 (9), 5243 (2021).
Rao, V. S. & Sundaramoorthy, K. Performance analysis of voltage multiplier coupled cascaded boost converter with solar PV integration for DC microgrid application. IEEE Trans. Ind. Appl. 59(1), 1013–1023 (2022).
Fan, X. et al. High voltage gain DC/DC converter using coupled inductor and VM techniques. IEEE Access 8, 131975–131987 (2020).
Mohamed, A. P., Chandrakala, K. V., Balamurugan, S., Subramaniam, U. & Almakhles, D. Adaptive maximum power extraction technique in fuel-cell integrated with novel DC-DC converter topology for low-power electric vehicle applications. Eng. Sci. Technol. Int. J. 54, 101723 (2024).
Mohebalizadeh, G., Alipour, H., Mohammadian, L. & Sabahi, M. A. A high step up multi-input dc/dc sepic-based converter with coupled inductor for renewable applications. Electr. Power Components Syst. 49(8), 767–781 (2021).
Veerabhadra, Nagaraja Rao, S. Assessment of high-gain quadratic boost converter with hybrid-based maximum power point tracking technique for solar photovoltaic systems. Clean. Energy. 6 (4), 632–645 (2022).
Dorji, S., Wangchuk, D., Choden, T. & Tshewang, T. Maximum power point tracking of solar photovoltaic cell using perturb & observe and fuzzy logic controller algorithm for boost converter and quadratic boost converter. Mater. Today Proc. 27, 1224–1229 (2020).
Belhadj, S. M. et al. Control of multi-level quadratic DC-DC boost converter for photovoltaic systems using type-2 fuzzy logic technique-based MPPT approaches. Heliyon https://doi.org/10.1016/j.heliyon.2025.e42181 (2025).
Ahmad, J. et al. A voltage multiplier circuit based quadratic boost converter for energy storage application. Appl. Sci. 10(22), 8254 (2020).
Naresh, S. V., Shareef, H., Kumar, B. & Peddapati, S. An ultra high gain quadratic boost converter with reduced electric stress for photovoltaic applications. IEEE Trans. Ind. Appl. https://doi.org/10.1109/tia.2025.3550107 (2025).
Ferreira, D. et al. Interleaved quadratic boost DC-DC converter with extended voltage gain and reduced switch voltage stress for photovoltaic applications. Open Res. Eur. 5, 55 (2025).
Ertekin, D. A high gain switched-inductor-capacitor DC-DC boost converter for photovoltaic-based micro-grid applications (CSEE Journal of Power and Energy Systems, 2023).
Kavin, K. S., Karuvelam, P. S., Matcha, M. & Vendoti, S. Improved BRBFNN-based MPPT algorithm for coupled inductor KSK converter for sustainable PV system applications. Electr. Eng. https://doi.org/10.1007/s00202-025-02952-9 (2025).
Kulasekaran, P. S. & Dasarathan, S. Design and analysis of interleaved high-gain bi- directional DC–DC converter for microgrid application integrated with photovoltaic systems. Energies 16 (13), 5135 (2023).
Ibrahim, N. F. et al. Multiport converter utility interface with a high-frequency link for interfacing clean energy sources (PV\wind\fuel cell) and battery to the power system: Application of the HHA algorithm. Sustainability 15(18), 13716 (2023).
Kumar, R. T. & Rajan, C. C. Integration of hybrid PV-wind system for electric vehicle charging: Towards a sustainable future. e-Prime 6, 100347 (2023).
Nagadurga, T., Narasimham, P. V. & Vakula, V. S. Global maximum power point tracking of solar photovoltaic strings under partial shading conditions using cat swarm optimization technique. Sustainability 13(19), 11106 (2021).
Shams, I., Mekhilef, S. & Tey, K. S. Maximum power point tracking using modified butterfly optimization algorithm for partial shading, uniform shading, and fast varying load conditions. IEEE Trans. Power Electron. 36(5), 5569–5581 (2020).
Latifi, M., Abbassi, R., Jerbi, H. & Ohshima, K. Improved krill herd algorithm based sliding mode MPPT controller for variable step size P&O method in PV system under simultaneous change of irradiance and temperature. J. Franklin Inst. 358(7), 3491–3511 (2021).
Karimi, H., Siadatan, A. & Rezaei-Zare, A. A hybrid P&O-fuzzy-based maximum power point tracking (MPPT) algorithm for photovoltaic systems under partial shading conditions. IEEE Access https://doi.org/10.1109/access.2025.3533314 (2025).
Jamaludin, M. N. I., NaimTajuddin, M. F., Younis, T., Thanikanti, S. B. & Khishe, M. Hybrid salp swarm maximum power point tracking algorithm for photovoltaic systems in highly fluctuating environmental conditions. Sci. Rep. 15(1), 650 (2025).
Karthick, A., Yamuna, M., Kaliappan, S. & Sakthi, T. Artificial Neural Network-Based SoC Estimation Under Variable Load Conditions. 2025 11th International Conference on Electrical Energy Systems (ICEES), Chennai, India, 868–871, (2025). https://doi.org/10.1109/ICEES67011.2025.11213289
Shalbaf, A. A., Shahidi, N. & Hemati, M. A high-gain interleaved DC-DC converter with reduced components for EV charging application. Comput. Electr. Eng. 118, 109316 (2024).
Izadi, M., Mosallanejad, A. & Eshkevari, A. L. An improved coupled inductor-based quadratic step-up DC–DC converter with a high step-up factor and reduced voltage overshoot on the power switch. IET Power Electron. 17(9), 986–1004 (2024).
Sivaram, N. V., Lavanya, A. & Navamani, J. D. Dual input single output quadratic boost converter for DC microgrid. e-Prime - Advances in Electrical Engineering, Electronics and Energy 9, 100683 (2024).
Lica, S., Lascu, D. & Lovasz, E. A. A new step-up-down quadratic DC–DC converter with a single active switch. J. Comput. Appl. Math. 436, 115362 (2024).
Funding
The authors received no specific funding for this study.
Author information
Authors and Affiliations
Contributions
- **D. Karthikeyan: ** Led conceptual development, curated all datasets, participated in methodology design, and drafted the original manuscript.- **Vinod Kumar Shukla: ** Co-developed the methodology, supervised the research activities, managed the project, validated analytical steps, and contributed to manuscript review and editing.- **K. Rajesh: ** Co-developed the methodology, assisted in supervision and project administration, performed validation, and contributed to manuscript review and editing.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Karthikeyan, D., Shukla, .K. & Rajesh, K. Machine learning-based MPPT integration with quadratic double-extended DC-DC converter for grid-connected PV-powered BLDC electric vehicles. Sci Rep 16, 11466 (2026). https://doi.org/10.1038/s41598-026-41938-w
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-026-41938-w
