
Abstract
Precise viscosity measurement in liquid media remains a critical challenge for micromachined resonant sensors. This primarily results from the inherent coupling between viscosity and density in hydrodynamic interactions, which limits independent quantification of viscosity. This work presents an aluminum nitride (AlN) piezoelectric microresonator vibrating at in-plane lateral mode for direct viscosity sensing in liquids. The resonator features cantilevered dual-plate structure with a wide step to leverage width-dependent effects on resonant frequency and quality factor. Through fluid-structure interaction modeling, the resonator is optimized to enhance vibrational characteristics while increasing linearity with respect to liquid viscosity. In experiments, the resonator incorporates fully electrical interfaces by combining self-actuation and self-sensing capabilities under liquid immersion. Furthermore, a significantly linear relationship between the quality factor and liquid viscosity is demonstrated. This linearity enables direct viscosity quantification through simultaneously measuring the resonant frequency and quality factor, which eliminates the need for prior density calibration required by conventional methods. The fabricated resonator achieves a mean absolute relative deviation of 2.65% with a maximum stability deviation of 3.43%. These results establish microplate-based laterally vibrating resonators as promising solutions for high-precision viscosity determination in compact liquid monitoring systems.

Similar content being viewed by others
Introduction
Viscosity quantification of liquids serves as a fundamental physical parameter in diverse industrial and biomedical domains, including chemical process monitoring, pharmaceutical formulation, and point-of-care diagnostics1,2,3,4. Conventional viscometry platforms, predominantly rotational rheometers and capillary viscometers, are often expensive, time-consuming and difficult in miniaturization configurations. Resonant microelectromechanical systems (MEMS) sensors offer an appealing alternative due to their online measurement capability, compatibility with integrated circuits, and potential for low-cost, high-volume fabrication5,6,7,8. For micromachined resonators operating in liquid environments, a vibration mode with reduced energy losses is sought. The viscous damping and hydrodynamic drag induced by the liquid impose challenges on the resonator to maintain a high quality factor and stable vibration for accurate measurement, particularly when compared to operation in gaseous environments9. The use of lateral vibrational modes which are also called in-plane flexural modes, offers a promising approach to enhance the quality factor of resonant sensors operating under liquid immersion10,11. It was previously proposed that lateral modes of the resonator are considered to yield lower viscous damping compared to out-of-plane modes, which can be attributed to shear flow rather than squeeze flow induced in the surrounding liquid. Cox et al.12 reported that laterally vibrating microcantilevers in aqueous glycerol achieve quality factors up to 4 times higher than those operating in fundamental out-of-plane flexural modes, which contributes to a substantial increase in mass sensitivity. Beardslee et al.13 presented a thermally excited cantilever operating in lateral modes for improving detection limits in liquid sensing, which exhibited a quality factor of 67 in water with reduced added fluid mass effects compared to out-of-plane flexural modes.
Although laterally vibrating resonators experience reduced fluid damping and enhanced quality factors, building a precise quantitative model for viscosity remains challenging. This challenge specifically involves modeling the relationship between viscosity and resonance parameters, particularly the quality factor and resonant frequency. This difficulty stems from the second Stokes problem14 that the resonator response depends on the product of liquid density and viscosity15,16, which constrains independent viscosity determination and often necessitates empirical fitting approaches. For instance, Riesch et al.17 proposed a laterally vibrating resonator under Lorentz force excitation, which served as a viscosity sensor by establishing a fitted curve between the damping factor and liquid viscosity. While numerous studies have focused on increasing the quality factor of in-plane-mode resonators in viscous liquids18,19,20, relatively few have addressed quantifying fluid properties. For specific configurations, the hydrodynamic model is available for the resonator to extract fluid density and viscosity values21,22. This approach is time-intensive and requires extensive experimental data post-processing. Generally, viscosity cannot be measured independently but is coupled with density calibration, which introduces larger errors than direct measurement methods. Consequently, fully leveraging the capability of enhancing the quality factor of laterally vibrating resonators for precise liquid viscosity quantification requires rigorous design and modeling.
The lateral-mode resonator has conventionally employed thermal actuation via boron-diffused heating resistors. Beardslee et al.23 demonstrated this approach using a hammerhead-shaped resonator with thermal excitation and piezoresistive detection, which estimated limits of detection in the sub-ppm range for gas-phase sensing. Xu et al.24 reported an electrothermally actuated microcantilever featuring a triangular tip for lateral vibration in liquid-phase analysis. Compared with the thermal excitation, the piezoelectric resonator employs the high electromechanical coupling of piezoelectric thin films, enabling self-actuation and self-sensing through intrinsic piezoelectric stress gradients. This mechanism significantly reduces thermal stress effects on surrounding fluids, which is beneficial for improving precision for liquid-phase measurements. However, piezoelectrically lateral-mode resonators have been limited in liquid sensing, which requires highly tailored structural designs and electrode layouts. For example, mode coupling induced by multi-mode excitation25 degrades modal purity and operational stability. Furthermore, the operation of resonators in lateral modes is typically characterized by higher modal stiffness and resonant frequencies than that of fundamental out-of-plane flexural modes. This condition limits the achievable mechanical strain, thereby compromising the piezoelectric self-sensing capability18,25. These constraints necessitate resonator designs that simultaneously optimize lateral-mode excitation efficiency and ensure electrical interfacing for compact liquid monitoring.
Here we present a piezoelectric aluminum nitride (AlN)-actuated resonator designed for lateral-mode vibration to serve as a liquid viscosity sensor. The vibrational characteristics of the resonator were analyzed through fluid-structure interaction modeling, which provided a design guideline to enhance the response linearity with liquid viscosity. By varying the dimensions of the cantilevered free end, the resonant frequency and the linear dependence of the quality factor on liquid viscosity were simultaneously optimized. Furthermore, the fabricated resonator was experimentally characterized, operating at a moderate frequency to allow self-actuation and self-sensing under liquid immersion. A highly linear relationship between the quality factor and liquid viscosity was revealed. This condition significantly simplifies the sensing configuration by establishing explicit and individual equations for viscosity measurement that are density-independent. Based on these investigations, the experiments demonstrated the high performance of the resonator in direct viscosity sensing. Such results confirm design strategies for implementing precise, miniaturized piezoelectric MEMS sensors in liquid-phase applications.
Materials and methods
Resonator design and modeling
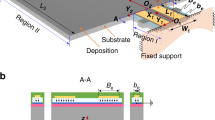
The microcantilevered dual-plate resonator comprises a trapezoidal host plate, a supporting plate stem, and slender beams for piezoelectric readout, as shown in Fig. 1a. The plate stem connected to the clamped side exhibits a largely reduced width compared to the host plate, which creates a wide step that enables targeted stiffness modulation. This configuration promotes in-plane compliance by facilitating x-y deformation of the trapezoidal plate while ensuring frequency separation from out-of-plane motions. The trapezoidal host plate serves as the primary fluid-interacting surface for viscosity sensing. Its narrowing free end reduces inertial mass and elevates the in-plane resonant frequency relative to conventional rectangular designs. The asymmetric mass distribution of the trapezoidal plate along the x-direction promotes the excitation of in-plane lateral modes by the piezoelectric drive force on the plate stem, which generates a shear-dominated flow field in the surrounding liquid. The slender beams provide piezoelectric transduction for signal readout, and partitioned blocks on both sides are designed to enhance distributed axial stress and electrical amplitude. The top electrodes are divided into sections positioned on both the plate stem and the slender beams. The actuation electrodes are located on the plate stem and are supplied with out-of-phase alternating voltages, which create a bending moment that excites the resonator into the lateral vibrational mode. The sensing electrodes on the slender beams detect the piezoelectric charge generated by the vibrational stress. Considering that the stress changes oppositely in the slender beams of the resonator under lateral mode, the sensing electrodes on each slender beam are divided into four parts. This configuration allows for an additive readout on the same side of the plate stem and a differential readout on the opposite side, thereby enhancing the electrical output amplitude of the resonator. This separated configuration of actuation and sensing electrodes is designed to minimize parasitic effects and charge crosstalk within the AlN layer during vibration.

a Detailed components of the resonator. b Mode shape of the fundamental flexural resonance under simulated vibrational displacements. c Mode shape of the fundamental torsional resonance under simulated vibrational displacements. d Mode shape of the 2nd flexural resonance under simulated vibrational displacements. e Mode shape of the lateral resonance under simulated vibrational displacements, also showing the modal stress on the slender beam
The finite element method (FEM) simulation model was developed using COMSOL Multiphysics® v. 6.2. The model combines domains of Solid Mechanics, Pressure Acoustics, and Thermoviscous Acoustics to capture fluid-structure interaction, along with an Electrostatics module for piezoelectric effect simulation. The silicon-based resonator was modeled by the Solid Mechanics module with an elastic modulus of 170 GPa, density of 2329 kg/m3, and Poisson’s ratio of 0.2826. The Electrostatics module was coupled with the Solid Mechanics module via the piezoelectric coefficient matrix. The Pressure Acoustics module was boundary-coupled with the Thermoviscous Acoustics module to model the fluid domain. And the outer boundaries of the fluid domain were set to spherical wave radiation conditions to emulate an unbounded fluid environment. The vibrational mode shape of the stepped dual-plate microcantilever is presented in Fig. 1b–e, including the fundamental flexural mode, torsional mode, 2nd flexural mode, and lateral mode. The flexural and torsional resonances constitute out-of-plane vibrational modes, while the lateral is an in-plane mode. It is noted that the torsional and 2nd flexural modes exhibit distinctly different mode shapes compared to conventional one-dimensional cantilevers, which is a consequence of the wide-step structure of the resonator. This resonator design enables functional separation: the plate stem primarily governs vibrational stiffness while the trapezoidal plate acts on hydrodynamic interactions through mode shape displacement.
The initial dimensions of the stepped dual-plate microcantilever are designed with L1 = 1100 μm, b1c = 1900 μm, b1f = 1500 μm, L2×b2 = 350 μm × 280 μm, L3×b3 = 145 μm × 20 μm, with a uniform thickness h = 30 μm. Figure 2a shows the variation of quality factor with resonant frequency in cyclohexane (dynamic viscosity of 0.959 mPa·s, density of 0.779 g/cm3). This analysis focuses on rectangular host plate where b1c equals b1f, with widths ranging from 500 – 2000 μm. The resonant frequency was modulated by varying the width of the rectangular plate while maintaining constant cantilever length to isolate width-dependent effects on vibrational behavior. The resonant frequency decreases with increasing plate width due to the reduced vibrational stiffness. The quality factor versus aspect ratio (dominant scale of width/length) is displayed as an inset plot. For different resonant modes, the in-plane lateral mode exhibits a quality factor exceeding that of the fundamental flexural mode by four times, while the latter is conventional for liquid sensing. Unlike the fundamental flexural mode, where width variations negligibly affect quality factor, higher-order modes indicate a width-dependent quality factor that increases until reaching a limiting value. This behavior indicates a two-dimensional modal effect, which enables optimization design across both length and width scales in plate-based resonators.

a Dependence of the quality factor on resonant frequency and aspect ratio for the resonator. b Flexural normal stress distribution along the slender beam for different vibrational modes of the resonator, derived from frequency-domain simulations
The frequency domain analysis was performed to illustrate the flexural stress distribution on slender beams of the microcantilever, as shown in Fig. 2b. The magnitude of the excitation voltage was 5 V. Frequency sweeps identified the flexural, torsional, and lateral modes. Results reveal that the lateral vibration mode exhibits the highest magnitude of flexural normal stress with highly uniform longitudinal distribution along the beam. This characteristic allows enhanced self-sensing readout through piezoelectrically induced voltage measurements. Additionally, distinct frequency separation and output amplitudes between lateral and out-of-plane vibration modes mitigate mode coupling. These advantages support the adoption of the lateral-mode configuration for viscosity sensing in liquids.
Structure optimization
The geometric analyses of the plate stem are shown in Fig. 3a, in which the width ranges from 150 to 500 μm while the length varies between 200 and 500 μm. These results indicate that the width predominantly influences the resonant frequency by affecting the modal stiffness, which shows a maximum increase of 303% at the 500 μm length. This finding also confirms the width dependence of the lateral-mode characteristics in plate-based resonators. Four liquid media with referenced viscosity and density values are listed in Table 1, which was obtained from commercially available REFPROP (Reference Fluid Properties) software. Figure 3b depicts the quality factor versus resonant frequency for the microcantilever immersed in liquid, with resonant frequency modulated by rectangular-plate widths from 500 to 1800 μm. The two-dimensional projections in the xz- and yz-planes are included. At a fixed plate width, the resonant frequency decreased by 2.97–3.15% from hexane to D5 medium, with at least one-third of the reduction observed in out-of-plane modes27,28. In contrast, the quality factor decreased substantially by 61.68 – 65.09%, which highlights its dominant sensitivity to liquid properties. Thus, for the resonator vibrating laterally, the inertial damping effects can be suppressed due to the minor frequency shift across liquids. The simulations investigating the influence of liquid density on resonant frequency and quality factor are provided in the Supplementary Information. These results confirm the quality factor to function as the primary indicator of viscous dissipation. By this means, a single-variable relationship between the quality factor and liquid viscosity is established, as shown in Fig. 3c. Linear fitting yields an R-square coefficient exceeding 0.99 for all tested widths of the rectangular host plate, which indicates that the proposed microcantilever displays considerable linearity with viscosity. This allows enhanced measurement accuracy through a simplified calibration model.

a Variation of the resonant frequency with the plate stem dimensions, in which the length ranges from 200 to 500 μm and the width ranges from 150 to 500 μm. b Quality factor as a function of resonant frequency and dynamic viscosity of liquid, for the rectangular-plate microcantilever. c Linear relationship between the quality factor and liquid viscosity for the rectangular-plate microcantilever. d Quality factor versus resonant frequency and square root of the liquid viscosity for trapezoidal-plate microcantilever with b1c = 1300 μm/1800 μm and b1f ranging from 500 to 1250 μm/1700 μm. e Dependence of the linear correlation coefficient (Quality factor-1/√μf) on free side width (b1f) of the trapezoidal-plate structure for the microcantilever
Further parameterization analyses for the trapezoidal host plate of the microcantilever are presented in Fig. 3d–e. The junction side width b1c is fixed at 1300 μm with free side width b1f ranging from 500 – 1250 μm. When the b1c is given by 1800 μm, the free side width b1f ranges from 500–1700 μm. The parameter sweep results are also projected onto xz- and yz-planes, separately. Reducing b1f from maximum to minimum increases the resonant frequency by 27% for b1c = 1300 μm, and by 33% for b1c = 1800 μm. The quality factor shows high dependence on the junction side width, whereas its changes with the free side width can be negligible. Additionally, the linear correlation coefficient is related to the free side width of the trapezoidal plate, as shown in Fig. 3e. Actually, high-performance viscosity sensors require the resonator operating at relatively low frequencies29 while maintaining a high quality factor under liquid immersion. This combination enables precise electrical characterization and facilitates integration, yet represents conflicting design in conventional devices. However, in our design strategy, the resonant frequency and quality factor can be independently optimized through geometric parameters. For a specified junction side width, the free side width can be chosen to balance achieving a superior quality factor versus 1/√μf linearity, and obtaining a sufficient resonant frequency for electrical characterization. The quality factor remains nearly constant, thereby ensuring vibrational stability during lateral oscillation in viscous media. Thus, the operating frequency, quality factor and its linearity with viscosity can be simultaneously optimized for liquid sensing. Based on these simulation results, the designed dimensions of the cantilevered plate resonator are listed in Table 2.
Results and discussion
Resonator chip fabrication
The detailed fabrication process of the resonator is illustrated in Fig. 4a–i. The resonator chip was fabricated on an N-type monocrystalline silicon wafer with a substrate thickness of 500 μm, where a 350 nm SiO₂ layer was grown via thermal oxidation on both sides to serve as an insulating layer for the low-resistivity silicon substrate. Subsequently, a Mo layer with a thickness of 110 nm was deposited by magnetron sputtering as the bottom electrode. Owing to its body-centered cubic crystal structure, Mo provides crystallographic texture transfer capability to AlN thin films with hexagonal symmetry. This allows the Mo layer to function as a growth template that promotes preferentially c-axis oriented AlN deposition. The AlN piezoelectric film with a thickness of 1 μm was then formed by reactive magnetron sputtering, followed by deposition and patterning of Cr/Au layers (20 nm/200 nm) to define the top electrodes and electrical leads. A 240 nm low-stress SiO₂ isolation layer was deposited to cover the wafer. Afterward, the SiO₂/AlN layers were patterned to expose the electrodes, thereby metal layers were deposited and patterned to form the bonding pads for the Mo bottom electrode. The silicon substrate was then etched from the backside to a depth of 475 μm using deep reactive ion etching to create the cavity. Finally, the resonator structures were patterned and released using inductively coupled plasma etching.

a Thermal oxidization. b Mo film deposition. c AlN film deposition. d Metal layer sputtering. e LPCVD SiO2 layer deposition. f Bonding pad exposure. g Bottom electrode exposure. h Bonding pad formation of the bottom electrode. i Microcantilever-based resonator release. j Fabricated piezoelectric resonator chip, including SEM image and detailed LSCM image. k Experimental platform of the resonator chip for liquid sensing
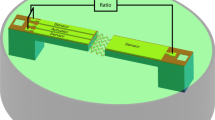
The fabricated resonator chip was characterized by scanning electron microscope (SEM) imaging, as shown in Fig. 4j, with a detailed view of the plate stem and slender beam through laser scanning confocal microscopy (LSCM). The concave frames surrounding the slender beam are introduced to improve etch uniformity during the fabrication process. The overall dimensions of the resonator chip are 4.2 mm × 3.4 mm × 0.5 mm (length × width × thickness). This size is smaller than that of some reported resonators for viscosity sensing30,31, which improves its suitability for integration into miniaturized systems, particularly for embedded applications in portable liquid monitoring. The experimental platform is shown in Fig. 4k, where a LabVIEW interface was developed for user control. The resonator chip was bonded to the PCB board using a non-conductive epoxy resin and fixed within a customized liquid cavity. The electrical connections, including the wire bonds and bonding pads, were encapsulated with a potting adhesive for electrical isolation under the liquid immersion. The packaged device is supplied with alternating current voltage from a signal generator. A lock-in amplifier is employed to output the piezoelectric voltage signal. Through this configuration, voltage-based self-actuation and self-sensing capabilities are implemented for the resonator device. Consequently, the resonator chip can be efficiently operated for viscosity measurement within liquid media environments.
Performance characterization
Figure 5a, b illustrates the frequency response of the resonator under varied excitation voltages in ambient air. Both resonant frequency and quality factor exhibit input-amplitude dependence. Nonlinear response of the resonator emerges when excitation exceeds 1.5 V, which can be evidenced by asymmetric quadrature voltage curves about the resonant frequency. Figure 5c quantifies resonant frequency and quality factor variations. The resonant frequency reduction results from the thermally induced decrease in the Young’s modulus8, where elevated excitation voltages increase the material temperature of the resonator. The quality factor reduction between 0.5 and 1.5 V can be attributed to a rise in dissipation of the vibrational energy, primarily arising from thermoelastic dissipation32 within the multilayered thin films of the resonator. As the excitation voltage increases in the range of 1.5–3.5 V, the enhanced electric field intensity within the AlN thin film increases the electromechanical energy conversion efficiency, which results in the improvement of the quality factor through mitigating electrical losses33,34. These results indicate that the piezoelectric resonator requires sufficient driving voltage to achieve preferable vibrational performance35,36. On the other hand, the nonlinearity behavior on the frequency response degrades the extraction accuracy of vibrational parameters during curve fitting.

a Frequency response in air measured from the in-phase component of the output voltage, and its variations versus excitation voltage. b Frequency response in air measured from the quadrature component of the output voltage, and its variations versus excitation voltage. c Quantified variations in resonant frequency and quality factor versus excitation voltage amplitude in air. d Frequency response of the resonator vibrating in hexane
Based on these results, an excitation voltage amplitude of 3 V was selected to exploit nonlinear effects while maintaining sufficient accuracy for resonant parameter extraction. To minimize the influence of temperature variations on the liquid viscosity and mechanical properties of the resonator, the experiments were conducted at a room temperature of 20 ± 0.2 °C, which is controlled by an air conditioning system. The measured frequency response in hexane across vibrational modes is presented in Fig. 5d. The resonator in lateral mode exhibits peak piezoelectrically induced voltage at its higher-order vibrational frequency. The more than 29 kHz frequency separation between this lateral mode and other out-of-plane modes ensures the purity of the mode shape for stable vibration in viscous sensing. An inset figure shows simulated resonant frequencies for flexural, torsional, and lateral modes of the fabricated resonator. Compared with the experimental results, the mean deviation of the simulated frequency is 4.91% with a maximum deviation of 7.30%. This agreement supports the validity of the fluid-structure interaction model used for resonator optimization.
In addition to the liquids listed in Table 1, heptane (density of 0.684 g·cm−3, viscosity of 0.411 mPa·s), methylcyclohexane (density of 0.769 g·cm−3, viscosity of 0.729 mPa·s) and MD2M (density of 0.854 g·cm−3, viscosity of 1.420 mPa·s) were added to the experiments. The quality factor and resonant frequency were tested at least ten times in each liquid to calculate the average value for viscosity determination. As shown in Fig. 6a–b, an excellent linear correlation exists between the quality factor and the square root of viscosity, with R-square coefficient reaching 0.999. The resonant frequency exhibits comparatively weaker linearity with the viscosity term. These relationships enable direct quantification of viscosity variations through resonance parameters and significantly simplify the calibration procedure. In contrast, conventional methods typically exhibit nonlinear response dependencies on liquid viscosity30,37, which are accompanied with a limitation that necessitates density calibration for viscosity measurement. Owing to the viscosity-dependence linearity, the measurement sensitivity is defined as the linearity slope with a value of 68 (mPa·s)1/2.

a Quality factor in various liquid media, with error bars indicating the standard deviation. b Resonant frequency in various liquid media, with error bars indicating the standard deviation. c Comparison of liquid viscosities based on experimental results and reference values. d Measurement deviation of the resonator for the liquid viscosity. e Standard deviation (SD) results of viscosity measurements in liquid media. f Relative standard deviation (RSD) results of viscosity measurements in liquid media
Building upon the observation that both the quality factor and resonant frequency vary inversely with the square root of viscosity, and the resonance parameters can be characterized by Eq. (1). By this means, the derivation of an explicit viscosity measurement function can be presented as Eq. (2). This advancement enables the direct determination of liquid viscosity while eliminating the conventional density calibration requirement31,38, thereby overcoming a fundamental limitation to existing methods in high-precision viscosity measurement of liquids.
where μL,mea is the measured value of the liquid viscosity, K1 and K2 are coefficients determined during the calibration process, QL and fR are the measured quality factor and resonant frequency under liquid immersion, respectively.
The fabricated resonator served as a viscosity sensor with calibrated coefficients K1 = 1.08 × 10−3 and K2 = 2.30 × 1018 mPa·s·Hz3. As shown in Fig. 6c, d, the measured viscosities across various liquids indicated outstanding agreement with reference viscosity values, yielding a mean absolute relative deviation of 2.65% and a maximum deviation of 5.84%. Beyond accuracy, the viscosity measurement stability of the resonator is critical for ensuring consistent results in liquid monitoring applications, yet it is seldom quantified in the existing studies. In this work, the viscosity measurement stability was evaluated by standard deviation (SD) and relative standard deviation (RSD, defined as SD/mean viscosity). Figure 6e, f reveals that the proposed resonator achieves 67 μPa·s for SD and 3.43% for RSD under worst-case conditions. This performance approaches the ±3% RSD specification of the commercial MiniVisc 3000 viscometer (Spectro Scientific Inc.). In addition, the resolution was estimated from the standard deviation in the resonant frequency and quality factor by Eq. (3):
where ΔμL is the estimated resolutions for viscosity, ζ satisfies the function of ζ = 1/QL + K1, ΔQL and ΔfR are fluctuations determined by the standard deviations of the quality factor and resonant frequency of the resonator, respectively. The value obtained for the model solutions is below 69 μPa·s.
Table 3 summarizes the main performances of the proposed laterally vibrating resonator for liquid viscosity sensing, alongside comparative data from published literature. Through the high-linearity design strategy, the experimental results validate superior comprehensive performances of the resonator in direct viscosity determination, with over 34% reduction in measurement error compared to state-of-the-art approaches. To further extend the measurement range for highly viscous liquids, advanced piezoelectric materials such as potassium sodium niobate (KNN) films39, and scandium-substituted AlN (ScAlN) films40 show considerable promise. The temperature variation is an important factor that influences the sensing performance of the resonator. The dynamic viscosity of most Newtonian liquids decreases exponentially with increasing temperature41. Simultaneously, the resonant frequency of silicon-based resonators typically exhibits a negative shift with temperature, primarily due to the temperature dependence of the Young’s modulus of silicon8. These concerns were largely mitigated by conducting the experiments in a temperature-controlled environment. Additionally, a temperature compensation algorithm could be employed to further enhance the measurement accuracy of the resonator in future work. This strategy would mainly correct for the temperature-induced variation in the Young’s modulus of the resonator under ambient conditions.
By integrating lateral-mode vibration with voltage-based electrical characterization, the fabricated resonator achieves precise, independently measurable fluidic parameters while maintaining operational simplicity. These investigations establish a potential foundation for developing high-performance piezoelectric resonators, particularly for liquid monitoring applications in industrial diagnostics and environmental monitoring. In addition, the design method featuring a lateral vibration mode with high-linearity response and self-sensing capability can be extended to other piezoelectric resonant sensors. This includes devices like pressure sensors42 and accelerometers43 for achieving highly accurate and integrated measurements.
Conclusion
This work presents a novel piezoelectric laterally vibrating resonator for direct measurement of liquid viscosity. The resonator was designed as a cantilevered dual-plate structure featuring wide steps, which achieved functional separation of fluid interaction domains while allowing self-actuated and self-sensing capabilities. Fluid-structure interaction modeling was established to guide geometric optimization to enhance the quality factor and its viscosity-dependence linearity. Experimental characterization of the fabricated AlN-resonator confirmed a highly linear model between its resonance parameters and the viscosity of various test liquids. This condition enabled direct viscosity determination without the typical requirement for coupled density calibration, which reached a high accuracy of 2.65%. In addition, the viscosity measurement stability showed a maximum standard deviation of 67 μPa·s. Our results demonstrated that the high-performance resonator was achieved by balancing density-independent viscosity determination with fully electrical characterization at a moderate resonant frequency. These advances contribute to addressing industrial needs for high-precision viscosity sensing in liquid monitoring applications.
References
Dufour, I. et al. Effect of hydrodynamic force on microcantilever vibrations: Applications to liquid-phase chemical sensing. Sens Actuators B Chem 192, 664–672 (2014).
Bakhtiaridoost, S., Musuroi, C., Volmer, M. & Florescu, M. Optoelectronic microfluidic device for point-of-care blood plasma viscosity measurement. Lab Chip 24, 3305–3314 (2024).
Tiwari, S., Dangi, A. & Pratap, R. A tip-coupled, two-cantilever, non-resonant microsystem for direct measurement of liquid viscosity. Microsyst Nanoeng 9, 34 (2023).
Puneeth, S., Kulkarni, M. B. & Goel, S. Microfluidic viscometers for biochemical and biomedical applications: A review. Eng Res Express 3, 022003 (2021).
Zhao, L. et al. An immersive resonant sensor with microcantilever for pressure measurement. Sens Actuators A Phys 303, 111686 (2020).
Khan, M. F. et al. Online measurement of mass density and viscosity of pL fluid samples with suspended microchannel resonator. Sens Actuators B Chem 185, 456–461 (2013).
Gu, X. et al. Ultrasensitive liquid sensor based on an embedded microchannel bulk acoustic wave resonator. Microsyst Nanoeng 10, 143 (2024).
Han, X. et al. Novel resonant pressure sensor based on piezoresistive detection and symmetrical in-plane mode vibration. Microsyst Nanoeng 6, 95 (2020).
Alshammri, A. et al. Quality Factor of a Microchannel Microresonator as a Function of Viscosity and Its Vibrational Mode: An Experimental and Computational Analysis. IEEE Sens J 23, 104–110 (2023).
Tao, Y. et al. Resonant cantilever sensors operated in a high-Q in-plane mode for real-time bio/chemical detection in liquids. Sens Actuators B Chem 157, 606–614 (2011).
Johnson, B. N. & Mutharasan, R. Biosensing using dynamic-mode cantilever sensors: a review. Biosens Bioelectron 32, 1–18 (2012).
Cox, R. et al. Damping and mass sensitivity of laterally vibrating resonant microcantilevers in viscous liquid media. 2011 Joint Conference of the IEEE International Frequency Control and the European Frequency and Time Forum (FCS) Proceedings, San Francisco, CA, USA, IEEE. (2011).
Beardslee, L. A. et al. Thermal Excitation and Piezoresistive Detection of Cantilever In-Plane Resonance Modes for Sensing Applications. J Microelectromech. Syst 19, 1015–1017 (2010).
Matsiev, L. (1999). Application of flexural mechanical resonators to simultaneous measurements of liquid density and viscosity. 1999 IEEE Ultrasonics Symposium. Proceedings. International Symposium, Tahoe, NV, USA, IEEE.
Huang, L. et al. Piezoelectric-AlN resonators at two-dimensional flexural modes for the density and viscosity decoupled determination of liquids. Microsyst. Nanoeng. 8 (2022).
Voglhuber-Brunnmaier, T. & Jakoby, B. Electromechanical resonators for sensing fluid density and viscosity—a review. Meas. Sci. Technol. 33 (2021).
Riesch, C. et al. A suspended plate viscosity sensor featuring in-plane vibration and piezoresistive readout. J Micromech Microeng 19, 075010 (2009).
Ali, A. & Lee, J. E. Y. Electrical characterization of piezoelectric-on-silicon contour mode resonators fully immersed in liquid. Sens Actuators A Phys 241, 216–223 (2016).
Ghanbari, M. & Rezazadeh, G. A MEMS-based methodology for measurement of effective density and viscosity of nanofluids. Eur J Mech - B/Fluids 86, 67–77 (2021).
Ruiz-Díez, V. et al. Modelling out-of-plane and in-plane resonant modes of microplates in liquid media. J Micromech Microeng 25, 074005 (2015).
Bircher, B. A., Krenger, R. & Braun, T. Automated high-throughput viscosity and density sensor using nanomechanical resonators. Sens Actuators B Chem 223, 784–790 (2016).
Maali, A. et al. Hydrodynamics of oscillating atomic force microscopy cantilevers in viscous fluids. J Appl Phys 97, 074907 (2005).
Beardslee, L. A. et al. In-Plane Vibration of Hammerhead Resonators for Chemical Sensing Applications. Acs Sens 5, 73–82 (2020).
Xu, J. et al Real-Time Operation of Microcantilever-Based in-Plane Resonators Partially Immersed in a Microfluidic Sampler. 2023 IEEE 36th International Conference on Micro Electro Mechanical Systems (MEMS): 1037-1040 (2023).
Sharos, L. B., Raman, A., Crittenden, S. & Reifenberger, R. Enhanced mass sensing using torsional and lateral resonances in microcantilevers. Appl Phys Lett 84, 4638–4640 (2004).
Xu, T. et al. Array Design of Piezoelectric Micromachined Ultrasonic Transducers With Low-Crosstalk and High-Emission Performance. IEEE Trans Ultrason Ferroelectr Freq Control 67, 789–800 (2020).
Cakmak, O. et al. Microcantilever based disposable viscosity sensor for serum and blood plasma measurements. Methods 63, 225–232 (2013).
Huang, L. et al. Characterization of higher-order resonant cantilevers for density determination in different flowing liquids. Meas. Sci. Technol, 34 (2023).
Shih, W. Y., Li, X., Gu, H., Shih, W.-H. & Aksay, I. A. Simultaneous liquid viscosity and density determination with piezoelectric unimorph cantilevers. J Appl Phys 89, 1497–1505 (2001).
Ju, S., Zhang, C., Zahedinejad, P. & Zhang, H. SC-Cut Quartz Resonators for Dynamic Liquid Viscosity Measurements. IEEE Trans Ultrason Ferroelectr Freq Control 68, 3616–3623 (2021).
Zhao, L. et al. A MEMS Resonant Sensor to Measure Fluid Density and Viscosity under Flexural and Torsional Vibrating Modes. Sensors 16, 830 (2016).
Kim, B. et al. Temperature dependence of quality factor in MEMS resonators. J Microelectromech Syst 17, 755–766 (2008).
Pinto, R. M., Gund, V., Dias, R. A., Nagaraja, K. & Vinayakumar, K. CMOS-integrated aluminum nitride MEMS: A review. J Microelectromech Syst 31, 500–523 (2022).
Miller, J. M. L. et al. Effective quality factor tuning mechanisms in micromechanical resonators. Appl. Phys. Rev., 5 (2018).
Li, Z. et al. Highly-accurate and non-invasive flowrate monitoring for miniature pipelines using piezoelectric micromachined ultrasonic transducers. Sens Actuators A Phys 372, 115339 (2024).
Nasrabadi, H. M., Mahdavi, M. & Moheimani, S. R. Q control of an AFM microcantilever with double-stack ALN sensors and actuators. IEEE Sens J 22, 3957–3964 (2022).
Singh, P., Sharma, K., Puchades, I. & Agarwal, P. B. A comprehensive review on MEMS-based viscometers. Sens. Actuators A Phys. 338 (2022).
Goodwin, A. et al. A vibrating edge supported plate, fabricated by the methods of micro electro mechanical system for the simultaneous measurement of density and viscosity: results for methylbenzene and octane at temperatures between (323 and 423) K and pressures in the range (0.1 to 68) MPa. J Chem Eng Data 51, 190–208 (2006).
Xia, F. et al. High sound pressure piezoelectric micromachined ultrasonic transducers using sputtered potassium sodium niobate. Microsyst Nanoeng 10, 205 (2024).
Lin, B. et al. A high Q value ScAlN/AlN-based SAW resonator for load sensing. IEEE Trans Electron Devices 68, 5192–5197 (2021).
Doolittle, A. K. Studies in Newtonian flow. I. The dependence of the viscosity of liquids on temperature. J Appl Phys 22, 1031–1035 (1951).
Han, X. et al. Advances in high-performance MEMS pressure sensors: design, fabrication, and packaging. Microsyst Nanoeng 9, 156 (2023).
Yang, J. et al. A T-shape aluminum nitride thin-film piezoelectric MEMS resonant accelerometer. J Microelectromech Syst 28, 776–781 (2019).
Toledo, J., Ruiz-Diez, V., Velasco, J., Hernando-Garcia, J. & Sanchez-Rojas, J. L. 3D-Printed Liquid Cell Resonator with Piezoelectric Actuation for In-Line Density-Viscosity Measurements. Sensors, 21 (2021).
Oliva, P., Bircher, B. A., Schoenenberger, C. A. & Braun, T. Array based real-time measurement of fluid viscosities and mass-densities to monitor biological filament formation. Lab Chip 19, 1305–1314 (2019).
Acknowledgements
This work was supported in part by the National Key Research and Development Program of China (2024YFB3211800), the National Natural Science Foundation of China (52505612), the Shaanxi Provincial Natural Science Basic Research Program (2025JC-YBQN-511), China Postdoctoral Science Foundation (2025M773611), and Free Exploration and Innovation - Teacher Program of Basic Scientific Research Business Expenses of Xi’an Jiaotong University (xzy012025047).
Author information
Authors and Affiliations
Contributions
L.H. proposed the sensor design and wrote the manuscript. D.L. and X.H. carried out data analysis. H.W., W.L. and G.N. assisted in experiment setup design. K.W. and P.Y. contributed to the experiments. W.R. and L.Z. provided guidance and support for the research. All authors contributed through scientific discussions.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Huang, L., Lu, D., Han, X. et al. Piezoelectric stepped-plate resonators vibrating at lateral modes for direct viscosity determination in liquids. Microsyst Nanoeng 12, 122 (2026). https://doi.org/10.1038/s41378-025-01135-7
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41378-025-01135-7
