
Abstract
This study develops a theoretical framework to evaluate the equivalent bulk and shear moduli of nanoporous materials, incorporating nanoscale surface effects through the Steigmann–Ogden surface mechanics model. By decomposing the spatial gradient into in-plane and out-of-plane components, stress boundary conditions at a spherical nanovoid/matrix interface are derived with improved computational efficiency. A representative volume element (RVE) is modeled as an infinite spherical matrix embedding a concentric nanoinhomogeneity or nanovoid. Generalized displacement solutions, rooted in elasticity theory, are formulated for both domains, with unknown coefficients determined using macroscopic strain conditions, Steigmann–Ogden interface constraints, and displacement finiteness at the nanoinhomogeneity’s center. The Mori–Tanaka homogenization approach is employed to compute the equivalent moduli, with nanovoid-specific results derived by setting the nanoinhomogeneity’s elastic moduli to zero. Numerical experiments, conducted on nanoporous aluminum, investigate the influence of surface bulk modulus, shear modulus, bending modulus, porosity, and nanovoid radius. The results demonstrate that surface effects are pronounced for smaller nanovoids (\(<10\) nm) and higher porosity, significantly deviating from classical predictions due to increased surface-to-volume ratios. The equivalent bulk modulus remains independent of surface bending modulus under hydrostatic loading, while the shear modulus exhibits strong sensitivity to bending stiffness, modulated by surface moduli.
Similar content being viewed by others

Introduction
Nanoporous materials have risen as important components in materials science, distinguished by their nanoscale structural attributes1. Owing to their exceptional specific strength and tunable pore architectures, these materials hold transformative potential across mechanical, automotive, and aerospace applications. Their exceptional properties stem from four synergistic characteristics that elevate them beyond traditional porous materials. The first is an exceptionally high surface area-to-volume ratio, which drives enhanced surface interactions critical for applications like catalysis and gas storage, where atomic-scale access governs performance2,3. Recent progress in synthesis, such as templated growth and atomic layer deposition, enables precise control over pore size distribution3. This allows tailoring of pore diameters from sub-nanometer to mesoporous scales, supporting selective molecular transport while ensuring structural stability. Such control extends to hierarchical pore designs, balancing mass transport and mechanical integrity4.
Equally notable is their unexpected mechanical strength. Despite high porosity, nanoporous materials achieve superior specific strength through nanoscale confinement, with surface stresses from undercoordinated atoms creating stiffening effects, as seen in nanoporous gold’s elasticity5. Their thermal properties are also transformed, with pore-surface phonon scattering slashing thermal conductivity while preserving electrical pathways, critical for thermoelectrics6. Additionally, these materials excel in molecular discrimination, leveraging size-exclusion and surface chemistry for selective adsorption via quantum confinement7. These unique properties make nanoporous materials ideal for energy storage, environmental cleanup, and biomedical drug delivery8,9.
The unique properties of nanoporous materials have promoted extensive theoretical research into their mechanical behavior, leveraging multiscale approaches that integrate continuum mechanics with surface science1. A seminal advancement was achieved by Gurtin and Murdoch10,11, who developed the Gurtin–Murdoch framework, introducing intrinsic surface stresses through conservation laws for linear and angular momentum. This model enabled quantitative analysis of size-dependent elasticity, explaining the enhanced stiffness observed in high-porosity nanomaterials. Early applications by Sharma et al.12 provided analytical solutions for stress concentrations around spherical nanoinclusions, showing that surface tension modifies stress decay rates by up to 40% compared to classical Eshelby solutions. Further developments by He and Li13 derived closed-form displacement fields for nanovoids in infinite media, demonstrating how surface energy mitigates stress localization near void boundaries. The framework’s adaptability was showcased by Kushch et al.14, who used multipole expansion techniques to address interacting nanoinclusions through spherical harmonic series. Beyond infinite domains, recent studies have extended the model to semi-infinite domains with near-surface nanovoids, revealing amplified size effects due to modified boundary conditions15. A recurring insight is the inverse relationship between material characteristic size (voids or inclusions) and surface stress contributions, with surface energy dominating below 10-20 nm. Advancements have also been achieved for the stress distributions due to multiply dispersed nanovoids. Dong et al.16 proposed a Trefftz collocation method to capture the interface stress effect among multiple interacting nano-scale spherical inhomogeneities, the size-dependent stress distributions were observed.
Concurrently, research on strength of nanoporous materials has revealed size-dependent failure mechanisms distinct from those in macroscopic porous materials. Within the Gurtin–Murdoch framework, Dormieux and Kondo17 extended Gurson’s yield criterion to account for void surface stresses and capillary forces, linking yield strength to intrinsic length scales and void radii. Nonlinear homogenization schemes by Dormieux and Kondo18 further clarified how surface stresses influence plastic yield criteria. Additionally, Zheng et al.19 introduced a two-level hierarchical RVE model, where the lower level comprises an incompressible matrix with nanosized spherical voids governed by Gurtin–Murdoch surface mechanics, and the higher level treats each material point as a compressible low-level RVE. These advancements provide a robust foundation for designing nanoporous materials tailored to specific mechanical applications.
Progress in effective modulus prediction has established micromechanical homogenization as a critical tool for designing nanoporous structures. Duan et al.20 pioneered this field with a composite sphere assemblage model, deriving explicit bulk and shear moduli expressions that incorporate surface tension via modified Eshelby tensors. Their work uncovered two notable findings: surface stresses enhance stiffness at high porosities, and classical modulus-density scaling fails below 100 nm void sizes. Chen et al.21 extended these results to multiaxial loading, showing that composites with cylindrical inclusions are characterized by five elastic constants. Duan et al.22 proposed a theoretical framework for multiphase nanocomposites, introducing size-dependent scaling laws for systems with nanoinclusions or nanoinhomogeneities. Recent advancements by Doan et al.23 utilized conformal mapping to predict modulus reductions in 2D materials with arbitrarily shaped nanovoids, tackling complex geometries. Recently, by combining the hybrid homogenization theory with the Gurtin–Murdoch surface mechanics model, Yin and Pindera24 investigated the homogenized moduli of columnar nanoporous materials. It was found that the homogenized moduli of porous silicon exhibit a reduction with decreasing nanopore size.
Despite significant advances, prior studies using the Gurtin–Murdoch model are limited by its neglect of surface bending resistance, a critical factor for accurately modeling nanoporous materials under complex loading25,26. These studies demonstrated that membrane-only models fail to account for curvature-dependent stiffness, particularly under transverse or flexural loads, leading to inaccurate predictions of mechanical behavior. The Steigmann–Ogden surface mechanics model addresses this limitation by incorporating both membrane and bending resistance terms, transforming stress analysis for nanoporous materials. By introducing a surface bending moment proportional to the surface curvature change tensor, this model enables more precise predictions of bending deformations, buckling instabilities, and void collapse, as validated and discussed by molecular dynamics simulations27. Implementing the model requires solving complex higher-order boundary conditions that couple in-plane stretching and shearing with out-of-plane bending, a challenge overcome through operator-split formulations and modified potential functions28,29. Recent research leveraging the Steigmann–Ogden model has focused on quantifying surface bending rigidity’s impact, providing deeper insights into nanoscale mechanical properties and guiding the design of advanced nanoporous structures.
Recent applications of the Steigmann–Ogden model have advanced the understanding of nanoporous materials by addressing spherical nanoinhomogeneities under various loading conditions. Zemlyanova and Mogilevskaya30 derived analytical solutions for an infinite elastic solid embedded with a spherical nanoinhomogeneity subjected to hydrostatic and deviatoric far-field traction loads, providing a foundation for stress analysis. Mogilevskaya et al.31 extended this work to simple shear loading, offering generalized displacement representations that enhance model versatility. Wang et al.32 utilized Papkovich–Neuber displacement potentials to obtain analytical displacement expressions for three uniaxial tensile and three pure-shear far-field tractions, while Ban et al.33 extended stress distribution solutions to a half-space domain, addressing boundary effects. More recently, Gao et al.34 developed analytical solutions for a two-dimensional heterogeneous matrix containing nanofibers or nanovoids under hydrostatic and shear loads, broadening the model’s applicability to diverse geometries and reinforcing its utility in designing nanoporous structures. Wu and Ye35 and Ye36 derived the effective elastic properties of nanofiber- and nanoparticle-reinforced composites, respectively. Both bounded and approximate solutions were provided in their works. Zhang et al.37 developed a finite interface element scheme to simulate the mechanical properties of nanoparticle-reinforced composites with interface curvature changes. The results demonstrate that interface bending stiffness indeed contributes to a moderate enhancement of Young’s modulus.
Investigations into the macroscopic yield behavior of nanoporous metallic materials have also leveraged the Steigmann–Ogden model to develop robust analytical frameworks. Zheng and Mi38 formulated an analytical strength criterion using a plastic surface mechanical model based on Gurson’s trial velocity, integrating plastic dissipations from matrix yield strength, capillary forces, surface tensile strength, and surface bending strength within an energy principle framework. Zheng et al.39 advanced this work by adopting Eshelby-type velocity, reexamining the yield strength in materials containing both microvoids and nanovoids. Employing micromechanics-based homogenization, they established a microscopic yield criterion defined by overall equivalent stress, initial yield strength, Gurtin–Murdoch and Steigmann-Ogden surface constants, and microscopic porosity, enhancing failure prediction accuracy. Complementarily, Huang et al.40 introduced a micromechanical framework for nanocomposites, deriving interior and exterior Eshelby tensors for spherical nanoinclusions under arbitrary uniform eigenstrains, as well as stress and strain concentration tensors for nanoinhomogeneities under uniform far-field loads, providing deeper insights into interface stretching and bending effects critical for nanoporous material design.
The present study advances the modeling of nanoporous materials by establishing a refined derivation process for the macroscopic equivalent bulk and shear moduli within the Steigmann–Ogden surface mechanics framework, which incorporates both membrane and bending effects at nanoscale interfaces. The primary innovation lies in the derivation pathway, which introduces a streamlined treatment of complex spherical boundary conditions through decomposition of the surface gradient operator into conventional spatial gradients combined with a spherical projection tensor, thereby improving computational efficiency. By applying the Mori–Tanaka homogenization method, we obtain analytical solutions specifically designed for nanoporous metallic materials such as aluminum. These solutions effectively capture curvature-dependent surface contributions not accounted for in conventional models such as Gurtin–Murdoch10,11. Compared to related studies40, our approach focuses explicitly on nanoporous systems and offers a comprehensive parametric analysis covering porosity, nanovoid size, and surface properties—such as the bending modulus—to reveal distinctive size-dependent responses, including modulus stiffening or softening. The resulting expressions achieve a practical balance between simplicity and predictive accuracy, offering a useful tool for material design and analysis.
Our results establish that the macroscopic mechanical properties are critically influenced by the sign of the surface elastic modulus: a positive value enhances both bulk and shear moduli, while a negative value reduces them. Although surface bending stiffness exclusively affects the equivalent shear modulus, its contribution becomes particularly significant at small nanovoid sizes, exhibiting a much stronger size dependence than surface tensile stiffness. For example, our model predicts that a material containing 5 nm pores can display stiffness variations of up to 20%—either stiffer or softer—compared to models neglecting surface bending resistance, depending on specific bulk properties, surface parameters, and porosity levels. This predictive capability is especially crucial for designing lightweight, high-strength nanoporous metallic materials for applications spanning aerospace, energy storage, and biomedical devices.
The remainder of this paper is organized as follows. Section 2 derives Steigmann–Ogden boundary conditions using both index and tensor notation, reducing complexities associated with surface gradient operators while preserving membrane and bending resistance. This facilitates analytical displacement, strain and stress solutions, which are integrated with volume averaging schemes in the homogenization process to evaluate equivalent elastic moduli, extending classical micromechanical methods. Section 3 conducts numerical analyses to explore parameter dependencies, examining how nanovoid radius, surface elastic constants, bending rigidity, and porosity influence macroscopic stiffness. It identifies critical thresholds where bending resistance outweighs surface energy, offering guidelines for optimizing nanoporous material design. Section 4 summarizes the conclusions, limitations as well as perspectives of the current work.
Method of solution
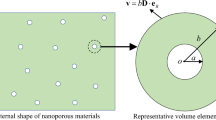
Nanoporous metallic materials, as illustrated in Fig. 1, feature a microstructure with a high density of nanoscale voids dispersed throughout. To simplify analysis, these nanovoids are assumed to be monodisperse, each with a uniform radius a, and sparsely distributed to minimize mutual interactions, following established models20. This assumption allows the mechanical effects of individual nanovoids on macroscopic properties to be aggregated through superposition, facilitating analytical treatment. A concentric spherical representative volume element (RVE) is constructed around a selected nanovoid, as shown in the right panel of Fig. 1, with the nanovoid radius a and outer boundary radius b (\(b \gg a\)). The porosity is defined as \(f = a^3/b^3\), reflecting the void volume fraction. The nanovoid surface adheres to the Steigmann–Ogden model, which accounts for both membrane stresses and bending resistance, critical for accurate nanoscale behavior25,26. Consistent with the Mori–Tanaka homogenization framework22, a uniform displacement field \(\textbf{u}\) is applied at the RVE’s outer boundary, inducing a macroscopic strain field \(\textbf{E}\) to evaluate equivalent elastic moduli.

Microstructural hierarchy of nanoporous material: (left) Macroscopic porous architecture, (middle) Uniform nanovoid distribution with characteristic spacing, (right) Representative volume element (RVE) selected for computational homogenization.
Boundary conditions of a Steigmann–Ogden type spherical nanovoid surface
The Gurtin–Murdoch surface elasticity model, as previously noted, omits flexural resistance, limiting its applicability for surfaces experiencing significant curvature changes under mechanical loading. Surface elastic potential energy depends on both in-plane stretching/shearing and curvature variations, particularly under compressive or bending stresses where membrane-only models fall short. To address this, Steigmann and Ogden25,26 enhanced surface energy formulations by incorporating curvature-dependent terms, introducing surface bending moments that transform nanoscale surface mechanics. Neglecting surface tension, the generalized boundary condition at a solid interface, as derived by Zemlyanova and Mogilevskaya29, is given by:
where \(\mathbf{{n}}\) is the outward unit normal vector, \(\left[ {\varvec{\sigma }} \right]\) denotes the Cauchy stress discontinuity across the surface, and \({\nabla _\textrm{s}}\) represents the surface gradient differential operator. The surface stress \({\varvec{\tau }}\) and bending moment tensor \(\mathbf{{M}}\) capture energy contributions from membrane stretching/shearing and curvature changes, respectively. This formulation extends classical mechanics by including second-order geometric effects, with the final terms addressing curvature-induced coupling between bending moments and surface orientation. Recent studies32,33,40 highlight that omitting these coupling terms leads to appreciable errors in nanovoid stress concentration factors at submicron scales, emphasizing their importance for nanoscale precision.
The presence of surface gradient operator \({\nabla _\textrm{s}}\) in the Steigmann–Ogden boundary conditions (1) poses computational challenges, complicating their evaluation. To enhance clarity and streamline the derivation, index notation is employed to express the Steigmann–Ogden boundary conditions on a spherical void surface. Such an operation introduces the surface projection tensor \(T_{ij}\) and normal projection tensor \(N_{ij}\), as defined by Gurtin et al.41:
These projection tensors satisfy orthogonal relationships, ensuring mathematical consistency:
To simplify the Steigmann–Ogden boundary conditions, the spatial gradient differential operator is decomposed into normal and in-plane components using surface and normal projection tensors:
where \({T_{ij}}\frac{\partial }{{\partial {x_i}}}\) corresponds to the surface gradient operator (\(\nabla _\textrm{s}\)). This decomposition transforms the Steigmann–Ogden boundary condition (1) into:
For a spherical nanovoid of radius a, the surface projection tensor and the gradient of the surface normal vector are expressed as:
This yields:
Substituting this into (5) results in:
Using index notation, the tensor form of the Steigmann–Ogden boundary conditions for a spherical nanovoid surface becomes:
Compared to the original formulation (1), this simplified version replaces surface gradient operators with spatial gradients and projection tensors, enhancing computational tractability. By defining all tensors in three-dimensional space, the formulation avoids the complexities of spherical surface restrictions, making it more suitable for implementation in mathematical software and supporting efficient analysis within the Mori–Tanaka homogenization framework for nanoporous materials.
In equation (9), the surface stress and bending moment tensors are linked to surface strain and curvature change tensors via constitutive relations, as established by Eremeyev and Lebedev28, Zemlyanova and Mogilevskaya29:
where \(\lambda _0\) and \(\mu _0\) denote the surface Lamé constants, \({\varepsilon }_{ij}^\textrm{s}\) represents the surface strain tensor, \(\xi _0\) and \(\chi _0\) are surface flexural rigidities, and \({\kappa _{ij}}\) is the surface curvature change tensor. The surface strain-displacement relationship, utilizing the surface projection tensor, is expressed as:
This relation indicates that surface strain is the symmetric component of the surface displacement gradient projected onto the material surface, capturing in-plane deformations. Conversely, the surface curvature change tensor is defined as the symmetric part of the surface gradient of the surface slope change vector:
The surface slope change vector is derived from surface displacement:
Through successive substitutions of equations (10a,b)-(13) into the boundary conditions (9), the Cauchy stress discontinuity on the right-hand side of (9) is expressed in terms of surface displacement derivatives. By confining evaluations to the material surface, this approach allows computations in conventional three-dimensional space, enhancing compatibility with standard mathematical software and facilitating integration with the Mori–Tanaka homogenization framework for nanoporous materials.
Equivalent bulk modulus of nanoporous materials
This subsection focuses on deriving the equivalent bulk modulus of the spherical RVE depicted in the right panel of Fig. 1, a critical step in understanding the macroscopic elastic behavior of nanoporous materials. To ensure generality, the analysis initially replaces the spherical nanovoid within the RVE with a nanoinhomogeneity, allowing for a broader applicability across composite systems. Once the equivalent bulk modulus for the RVE containing a nanoinhomogeneity is determined, the nanoinhomogeneity’s properties are adjusted to represent a nanovoid, aligning with the study’s focus on porous metals. The macroscopic strain field applied to the RVE’s outer boundary is assumed to be centro-symmetric, expressed as:
This strain field induces a hydrostatic stress state, resulting in isotropic expansion or contraction without shear deformation. Consequently, both the nanoinhomogeneity and the surrounding matrix exhibit centro-symmetric displacement fields. Drawing from elasticity theory, the general centro-symmetric displacement solutions, as outlined by Barber42, are:
where superscripts 1 and 2 denote the nanoinhomogeneity and matrix, respectively. The corresponding strain fields are derived using geometric relationships:
Stress fields are then computed via generalized Hooke’s law:
where \(\lambda _{1,2}\) and \(\mu _{1,2}\) are the Lamé constants for the nanoinhomogeneity and matrix, with bulk moduli defined as \(\kappa _{1,2}=(3\lambda _{1,2}+2\mu _{1,2})/3\).
The radial displacement fields introduce four unknown coefficients (\(F_1\), \(F_2\), \(G_1\), \(G_2\)), necessitating four boundary conditions. First, the displacement on the RVE’s outer boundary aligns with the macroscopic strain:
Second, to prevent singularity at the nanoinhomogeneity’s center, the coefficient \(G_1\) is set to zero:
Third, within the Gurtin–Murdoch and Steigmann–Ogden frameworks, displacement continuity is maintained across the nanoinhomogeneity-matrix interface:
Finally, the stress discontinuity across the interface is governed by the Steigmann–Ogden boundary conditions (9). Under the centro-symmetric strain field, the interface slope change vector evaluates to zero:
This nullifies the surface curvature change tensor, eliminating surface bending moment contributions in the boundary condition:
This stress condition mirrors the Gurtin–Murdoch model, indicating that, for hydrostatic loading, the equivalent bulk modulus is unaffected by surface bending stiffness, simplifying the analysis. Using these four boundary conditions (18, 19, 20, 22), the coefficients (\(F_1\), \(F_2\), \(G_1\), \(G_2\)) are uniquely determined, enabling the calculation of the RVE’s equivalent bulk modulus. This approach, rooted in the Steigmann–Ogden model, provides a robust framework for predicting the elastic response of nanoporous materials, with implications for designing materials with tailored mechanical properties.
The derivation of the equivalent bulk modulus for the spherical RVE is an important step in characterizing the macroscopic elastic properties of nanoporous materials, building on the Steigmann–Ogden surface mechanics model. Employing the homogenization method, the average strain within a solid volume is calculated using the principle of volume averaging, as demonstrated by Duan et al.20, which integrates surface displacements over the RVE’s boundary:
This approach allows the evaluation of average strains in the nanoinhomogeneity and matrix domains within the RVE, accounting for their distinct mechanical properties:
where the surface modulus \(\kappa _\textrm{s}\) is defined relative to the surface Lamé constants, matrix shear modulus and nanovoid radius:
The macroscopic strain and stress of the entire RVE are determined by volume-weighted averages, incorporating contributions from both the nanoinhomogeneity and matrix, as well as surface stresses:
where the average surface stress tensor accounts for stress discontinuities at the interface:
By substituting equations (26a) and (27) into (26b), the equivalent bulk modulus of the nano-composite RVE is derived:
Despite differences in intermediate variables and notation, the derived equivalent bulk modulus (28) for nano-composites is completely equivalent to that presented in Huang et al.40, validating the accuracy of our computational framework.
To model a nanovoid, the nanoinhomogeneity’s bulk modulus is set to zero (\(\kappa _1=0\)), yielding the equivalent bulk modulus for a nanovoid-containing RVE:
For a nanovoid-containing RVE with an incompressible matrix (\(\kappa _2 \gg \mu _2\)), the expression simplifies further:
These formulations reveal that the equivalent bulk modulus remains unaffected by the surface bending stiffness under hydrostatic loading, which is consistent with prior work by Huang et al.40. This independence arises because the centro-symmetric strain field eliminates curvature changes, nullifying bending moment contributions in the Steigmann–Ogden boundary conditions. The derived modulus accounts for porosity (f), surface elastic constants (\(\kappa _\textrm{s}\)), and matrix properties, providing a comprehensive model for predicting the elastic response of nanoporous materials. This approach extends classical homogenization by incorporating nanoscale surface effects, offering insights for designing materials with tailored mechanical properties. The ability to reduce the general nanoinhomogeneity case to a nanovoid-specific solution enhances the model’s scope, applicable to both porous materials and nanocomposites. Furthermore, the explicit dependence on porosity and surface moduli enables us to optimize material stiffness by adjusting nanovoid size and distribution, aligning with the broader goal of advancing nanoporous material design through micromechanical analysis.
Equivalent shear modulus of nanoporous materials
The determination of the equivalent shear modulus for the spherical RVE containing a nanoinhomogeneity or nanovoid is a critical component of this study, complementing the analysis of the bulk modulus and advancing the understanding of nanoporous materials’ elastic behavior. Unlike the hydrostatic loading case, shear deformation introduces complex surface interactions, necessitating the inclusion of curvature-dependent effects in the Steigmann–Ogden model. To address this, a macroscopic axisymmetric deviatoric strain field is applied to the RVE’s outer boundary, characterized by a zero trace to isolate shear effects:
This deviatoric strain field induces a pure shear deformation, prompting distinct displacement responses in the nanoinhomogeneity and matrix. Based on elasticity theory, as detailed by Barber42, the displacement fields in both domains are expressed using spherical harmonics to capture the axisymmetric nature of the deformation:
where \({P_2}\left( \cos \varphi \right)\) represents the second-order Legendre polynomial, aligning with the angular dependency of the strain field. The strain fields are derived by substituting these displacements into the geometric relations (16a,b), and the corresponding stress fields are obtained using generalized Hooke’s law (17a,b). In the absence of body forces, stress equilibrium in both domains imposes:
These equilibrium conditions yield eight relationships among the sixteen unknown coefficients in the displacement fields:
To fully resolve the sixteen coefficients, eight additional boundary conditions are required. The displacement boundary condition at the RVE’s outer boundary specifies:
Substituting the matrix’s radial displacement yields:
To ensure finite displacements at the nanoinhomogeneity’s center, singularity terms are eliminated:
Displacement continuity across the nanoinhomogeneity-matrix interface, consistent with the Gurtin–Murdoch and Steigmann–Ogden models, requires:
These conditions produce:
The Steigmann–Ogden stress discontinuity condition (8) resolves the remaining coefficients \(F_{11}\) and \(F_{23}\), fully determining the displacement, strain, and stress fields.
With the fields established, the equivalent shear modulus is computed using volume-averaged strains. The average strains in the nanoinhomogeneity and matrix, based on the definition in (23), are:
where:
The macroscopic strain of the RVE is obtained via volume averaging:
The macroscopic stress incorporates surface stress contributions, distinguishing it from classical homogenization:
Under deviatoric loading, the constitutive relation is:
enabling the calculation of the equivalent shear modulus of a nano-composite RVE:
where:
and
Note that the parameter \(\kappa _\textrm{s}\) has been defined in (25a). Unlike the bulk modulus, the shear modulus explicitly depends on surface bending stiffness (\(\eta _\textrm{s}\)), reflecting curvature coupling in shear deformation. Although intermediate variables and notation differ, the derived equivalent shear modulus (45) for nano-composites is mathematically identical to that reported in Huang et al.40, confirming the accuracy of our computational approach.
For a nanovoid (\(\kappa _1=\mu _1=0\)), the equivalent shear modulus can be determined as:
For an incompressible matrix (\(\kappa _2 \rightarrow \infty\)), the equivalent shear modulus further simplifies to:
This formulation underscores the Steigmann–Ogden model’s ability to capture bending effects, enhancing the accuracy of shear modulus predictions for nanoporous materials and providing an accurate framework for optimizing mechanical performance through nanovoid size and surface property adjustments.
Results and discussion
This section presents a comprehensive quantitative analysis of how surface Lamé constants, surface flexural rigidities, porosity, and nanovoid radius influence the macroscopic bulk and shear moduli of nanoporous materials. The numerical results stem from direct evaluation of the derived analytical formulas, with no reliance on simulation-based methods. The analysis leverages the Steigmann–Ogden surface mechanics model to capture nanoscale surface effects, which significantly deviate from classical predictions, particularly at submicron scales. For the microscopic RVE, the matrix material is modeled as aluminum, characterized by a shear modulus of \(\mu _2=23.6\) GPa and a bulk modulus of \(\kappa _2=51.1\) GPa, reflecting typical properties of metallic matrices in nanoporous structures.
Following the methodology of Duan et al.20, two distinct sets of surface bulk and shear moduli are adopted for the nanovoid surface: Case 1, with \(\kappa _0=12.932\) nN/nm and \(\mu _0=-0.3755\) nN/nm, representing a positive surface stiffness, and Case 2, with \(\kappa _0=-5.457\) nN/nm and \(\mu _0=-6.2178\) nN/nm, indicating a negative surface stiffness that softens the material43. Specifically, Case 1 corresponds to the surface elastic properties of the closely-packed [111]-oriented aluminum surface, characterized by higher surface stiffness, while Case 2 represents the relatively loosely-packed [100]-oriented aluminum surface, exhibiting different elastic behavior. These parameters were selected to capture the range of surface effects (e.g., strengthening or softening) on the effective bulk and shear moduli of nanoporous aluminum, reflecting the influence of crystallographic orientation on surface mechanics. To explore the influence of surface bending rigidity, unique to the Steigmann–Ogden model, two values of the surface bending modulus are considered: \(\eta _0=0\) nN\(\cdot\)nm, effectively reducing to the Gurtin–Murdoch model, and \(\eta _0=30\) nN\(\cdot\)nm, incorporating curvature-dependent effects27. For benchmarking, classical solutions that neglect surface effects are also included, providing a baseline to highlight the significance of nanoscale phenomena in the numerical examples.

Validation of the normalized equivalent (a) bulk modulus and (b) shear modulus against the Gurtin–Murdoch solutions from Duan et al.20, with matrix properties \(\kappa _{2}=75.2\ \textrm{GPa}\) and \(\nu _{2}=0.3\).
The present solution methodology is first subjected to comprehensive validation against well-established theoretical results available in the literature. Specifically, we compare our predictions with the analytical framework developed by Duan et al.20, who derived the effective elastic moduli of nanocomposites containing spherical inhomogeneities. The comparative results are summarized in Fig. 2, where subplots (a) and (b) illustrate the variations of the normalized equivalent bulk modulus and shear modulus, respectively, as functions of porosity. It is clearly observed that our predictions exhibit excellent agreement with the reference solutions under both Case 1 and Case 2 surface elastic properties. This consistent alignment across different material parameters strongly affirms the reliability and accuracy of the proposed solution methodology, thereby establishing a solid foundation for the subsequent parametric analyses presented in this study.

Equivalent bulk modulus normalized with respect to its classical counterpart (\(\kappa _c\)) as a function of nanovoid radius. Two levels of porosity (\(f=0.1,0.2\)) and two sets of surface bulk and shear moduli are considered: Case 1 (\(\kappa _0=12.932\) nN/nm, \(\mu _0=-0.3755\) nN/nm, \(\eta _0=0\)) and Case 2 (\(\kappa _0=-5.457\) nN/nm, \(\mu _0=-6.2178\) nN/nm, \(\eta _0=0\)).
Figure 3 illustrates the normalized equivalent bulk modulus of nanoporous aluminum as a function of nanovoid radius, with no surface bending rigidity to isolate the effects of surface Lamé constants. The results reveal distinct behaviors: Case 1 significantly enhances the equivalent bulk modulus relative to the classical value, indicating that positive surface stiffness strengthens the material’s resistance to hydrostatic deformation. Such a phenomenon agrees with the behavior of Young’s modulus reported by Zhang et al.37. In contrast, Case 2 reduces the bulk modulus, suggesting that negative surface stiffness softens the material, making it more compliant under compression. This behavior agrees qualitatively with the homogenized moduli of columnar porous silicon reported by Yin and Pindera24. It is worth pointing out that, since typical nanoporous materials possess a robust matrix phase, the primary effect of a negative surface modulus is to soften the macroscopic effective elastic moduli (in contrast to a positive surface modulus, which stiffens the material). Stability issues, such as structural collapse, may only occur in systems with very thin-walled spherical shells.
The influence of surface effects diminishes as the nanovoid radius increases, with the equivalent bulk modulus approaching the classical value for larger voids, consistent with the inverse relationship between surface-to-volume ratio and nanoscale effects. Furthermore, the impact of surface properties becomes more pronounced at higher porosity levels, as the increased void fraction amplifies the contribution of surface stresses to the overall elastic response. This behavior underscores the critical role of surface effects in tailoring the mechanical properties of nanoporous materials, particularly in applications requiring high stiffness-to-weight ratios, such as aerospace components or energy-absorbing foams. The absence of bending stiffness in these results aligns with the theoretical finding that the bulk modulus is independent of curvature effects under hydrostatic loading, as derived in Section 2.2, reinforcing the robustness of the Steigmann–Ogden model in distinguishing deformation modes.

Equivalent shear modulus normalized with respect to its classical counterpart (\(\mu _c\)) as a function of nanovoid radius. Two levels of porosity (\(f=0.1,0.2\)) and two sets of surface bulk and shear moduli are considered: Case 1 (\(\kappa _0=12.932\) nN/nm, \(\mu _0=-0.3755\) nN/nm, \(\eta _0=0\)) and Case 2 (\(\kappa _0=-5.457\) nN/nm, \(\mu _0=-6.2178\) nN/nm, \(\eta _0=0\)).
Figure 4 presents the normalized equivalent shear modulus of nanoporous aluminum as a function of nanovoid radius, with normalization performed relative to the classical shear modulus \(\mu _c\), which neglects surface effects. The analysis evaluates two sets of surface bulk and shear moduli, consistent with the parameters used in Fig. 3. The results highlight significant deviations from classical predictions: Case 1 enhances the equivalent shear modulus, suggesting that positive surface stiffness enhances the material’s resistance to shear deformation. Conversely, Case 2 substantially reduces the shear modulus, indicating that negative surface stiffness increases material compliance under shear loading. Notably, the surface effects in Case 2 are more pronounced than in Case 1, likely due to the larger magnitude of negative moduli, which amplify softening at the nanovoid interfaces. As the nanovoid radius exceeds 10 nm, surface effects diminish rapidly, and the shear modulus converges toward the classical value, reflecting the reduced surface-to-volume ratio at larger scales. This trend aligns with the theoretical derivations in Section 2.3, which demonstrate the sensitivity of shear modulus to surface properties under deviatoric loading, unlike the independence of bulk modulus from bending stiffness. The pronounced influence of surface effects at smaller radii and higher porosities underscores the potential for tailoring nanoporous aluminum’s mechanical properties through nanovoid size control, offering insights for designing lightweight, high-performance materials for applications such as structural composites or energy-absorbing structures.

Variation of normalized equivalent shear modulus as a function of nanovoid radius of nanoporous aluminum with two levels of surface flexural rigidities. The porosity is fixed as \(f=0.2\). Also, two sets of surface bulk and shear moduli are considered: Case 1 (\(\kappa _0=12.932\) nN/nm, \(\mu _0=-0.3755\) nN/nm) and Case 2 (\(\kappa _0=-5.457\) nN/nm, \(\mu _0=-6.2178\) nN/nm).
The theoretical framework established in Section 2.3 demonstrates that the equivalent bulk modulus, given by equation (29), is independent of the surface bending modulus due to the absence of curvature effects under hydrostatic loading. Consequently, the influence of surface bending is analyzed exclusively for the equivalent shear modulus, where curvature-dependent terms in the Steigmann–Ogden model become significant. Figure 5 shows the normalized equivalent shear modulus of nanoporous aluminum as a function of nanovoid radius, normalized against the classical shear modulus \(\mu _c\) that neglects surface effects. The analysis considers two surface flexural rigidities (\(\eta _0=0\) nN\(\cdot\)nm and \(\eta _0=30\) nN\(\cdot\)nm) at a fixed porosity of \(f=0.2\), with parameters consistent with those in Figs. 3 and 4. The results indicate that surface effects stabilize for nanovoid radii exceeding 30 nm, with the shear modulus converging to classical predictions as the surface-to-volume ratio decreases. These trends align well with those reported in Fig. 6 of Huang et al.40.
A key observation from Fig. 5 is the contrasting influence of surface bending modulus on shear response. In Case 1, introducing \(\eta _0=30\) nN\(\cdot\)nm significantly reduces the shear modulus compared to the zero-bending case, indicating that curvature-dependent effects induce material softening under shear deformation, particularly at radii below 10 nm. In Case 2, however, the shear modulus shows minimal sensitivity to bending stiffness, as the dominant negative surface stiffness overshadows curvature effects. This differential behavior underscores the Steigmann–Ogden model’s ability to capture complex surface interactions, where curvature terms—absent in hydrostatic loading—are activated under shear. These findings provide practical guidance for optimizing nanoporous aluminum’s shear resistance through nanovoid size and surface properties, supporting applications in lightweight aerospace structures and energy-absorbing foams.

Variation of normalized equivalent bulk modulus as a function of porosity of nanoporous aluminum with four nanovoid radii. The surface bending modulus is set as zero since it has no effects on equivalent bulk modulus. Two sets of surface bulk and shear moduli are considered: Case 1 (\(\kappa _0=12.932\) nN/nm, \(\mu _0=-0.3755\) nN/nm) and Case 2 (\(\kappa _0=-5.457\) nN/nm, \(\mu _0=-6.2178\) nN/nm).
Figure 6 presents the normalized equivalent bulk modulus of nanoporous aluminum as a function of porosity, normalized against the classical bulk modulus \(\kappa _c\). The surface bending modulus is set to zero, consistent with the theoretical conclusion in Section 2.2 that curvature effects do not influence the bulk modulus under hydrostatic loading. Two surface parameter sets are examined: Case 1, with positive surface stiffness, enhances the bulk modulus, indicating improved resistance to hydrostatic compression, while Case 2, with negative surface stiffness, reduces it, suggesting greater material compliance. The influence of surface effects intensifies with increasing porosity and decreasing nanovoid size, as higher void fractions and surface-to-volume ratios amplify the role of surface stresses. These trends align with earlier results and highlight the importance of porosity and nanoscale geometry in designing nanoporous aluminum with tailored elastic properties.

Variation of normalized equivalent shear modulus as a function of the porosity of nanoporous aluminum with four different nanovoid radii. The surface bending modulus is set as \(\eta _0=30\) nN\(\cdot\)nm. Also, two sets of surface bulk and shear moduli are considered: Case 1 (\(\kappa _0=12.932\) nN/nm, \(\mu _0=-0.3755\) nN/nm) and Case 2 (\(\kappa _0=-5.457\) nN/nm, \(\mu _0=-6.2178\) nN/nm).
Figure 7 shows the normalized equivalent shear modulus versus porosity for nanoporous aluminum, with the surface bending modulus fixed at \(\eta _0=30\) nN\(\cdot\)nm to emphasize curvature effects under shear. In Case 2, a sharp decrease in shear modulus occurs at higher porosities (\(f>0.2\)), reflecting the combined softening effect of negative surface moduli and bending resistance. In Case 1, a modest increase in shear modulus is observed, indicating that positive surface parameters partially counteract bending-induced softening. These behaviors are consistent with the model derivations in Section 2.3, where curvature terms specifically govern the shear response. As porosity increases or nanovoid size decreases, surface contributions become more pronounced, leading to greater deviations from classical predictions. These results agree with Fig. 5 of Huang et al.40 and reinforce the critical roles of porosity, nanoscale geometry, and surface bending in controlling shear properties, offering specific insights for material optimization in structural and functional applications.

Comparison of estimates derived from the bound solution, generalized self-consistent method (GSCM)36, Maxwell-type approximation30, and the present Mori–Tanaka method (MTM). Material and surface parameters: \(\kappa _1=2.60\) GPa, \(\mu _1=0.54\) GPa, \(\kappa _{2}=5.91\) GPa, \(\mu _2=2.25\) GPa, \(\lambda _0=5\) nN/nm, \(\mu _0=-2.5\) nN/nm, \(\xi _0=5\ \mathrm {nN\cdot nm}\), \(\chi _0=-2.5\ \mathrm {nN\cdot nm}\).
In the context of predicting effective elastic properties for nanoparticle-reinforced composites, several homogenization schemes have been developed in the literature. Notably, Ye36 established a theoretical framework based on the generalized self-consistent method (GSCM), accompanied by rigorous bounds derived from the composite sphere assemblage model. On the other hand, Zemlyanova and Mogilevskaya30 formulated an alternative approach using a Maxwell-type approximation. In this study, we systematically compare the predictions of these established methods with those obtained from the present Mori–Tanaka method (MTM), as comprehensively illustrated in Fig. 8. The comparative analysis reveals that the MTM estimates consistently reside within the theoretical bounds provided by Ye36 across a broad range of porosity values. However, at extremely high porosity levels (\(f>0.9\)), discernible deviations emerge between the MTM predictions and the GSCM-based results. Notwithstanding this limitation at extreme porosity conditions, the MTM approach offers distinct advantages in terms of analytical tractability, providing relatively simpler closed-form expressions that maintain satisfactory predictive accuracy for the effective shear modulus in most practical engineering applications involving nanoporous composites.
Conclusions, limitations and perspectives
Conclusions
This study developed a framework for analyzing the elastic properties of nanoporous materials, focusing on the derivation of equivalent bulk and shear moduli using the Steigmann–Ogden surface mechanics model. The investigation began by formulating the stress boundary conditions at a spherical nanovoid/matrix interface, leveraging the Steigmann–Ogden model to account for surface stress and bending effects. By decomposing the spatial gradient differential operator into in-plane surface and out-of-plane normal components, the derivations were significantly simplified, enhancing computational efficiency and clarity. A representative volume element (RVE) was constructed, comprising an infinite spherical matrix with a concentric nanoinhomogeneity or nanovoid, providing a robust model for homogenization. Employing elasticity theory, generalized displacement solutions were proposed for both the matrix and nanoinhomogeneity, with unknown coefficients determined using macroscopic strain conditions at the RVE’s outer boundary, Steigmann–Ogden interface conditions, and the requirement of finite displacements at the nanoinhomogeneity’s center. These solutions enabled the evaluation of equivalent bulk and shear moduli via the Mori–Tanaka homogenization approach. For nanovoid-specific results, the elastic moduli of the nanoinhomogeneity were set to zero, yielding expressions applicable to porous materials. Numerical experiments systematically explored the influence of surface bulk modulus, surface shear modulus, surface bending modulus, porosity, and nanovoid radius on the macroscopic elastic properties of nanoporous aluminum, revealing critical insights into nanoscale surface effects.
First, the parametric studies underscored that surface effects exhibit a strong dependence on nanovoid radius. Smaller nanovoids, with higher surface-to-volume ratios, amplify surface effects, significantly altering the equivalent bulk and shear moduli compared to classical predictions. However, when the nanovoid radius exceeds 10 nm, surface effects diminish, and the moduli approach classical values. This trend highlights the nanoscale regime’s dominance in enhancing material properties through surface engineering. Second, a pronounced positive correlation exists between surface effects and porosity. Higher porosity levels, corresponding to increased void fractions, amplify the contribution of surface stresses, leading to more significant deviations from classical moduli. This relationship suggests that porosity is a key parameter for tailoring the mechanical behavior of nanoporous materials. Third, the surface bending modulus, unique to the Steigmann–Ogden model, does not influence the equivalent bulk modulus under hydrostatic loading, due to the absence of curvature changes. However, it significantly affects the equivalent shear modulus, with the extent of influence depending on the surface bulk and shear moduli. For instance, Fig. 5 shows that surface bending stiffness reduces the shear modulus in Case 1 but has minimal impact in Case 2, reflecting the complex interplay of surface properties. These findings provide a robust foundation for designing nanoporous materials with tailored elastic properties, applicable to lightweight structures, energy-absorbing foams, or biomedical implants, by optimizing nanovoid size, porosity, and surface characteristics.
Limitations
This study advances the understanding of surface effects on the elastic moduli of nanoporous materials using the Steigmann–Ogden surface mechanics model; however, several limitations must be acknowledged. First, the model assumes idealized spherical, monodisperse nanovoids and an isotropic matrix, which simplifies the complex, irregular pore geometries, void size distributions (e.g., bimodal populations), and anisotropic properties found in real nanoporous materials like aluminum. These assumptions, while enabling analytical tractability, may limit the model’s applicability to non-ideal systems. Second, the analysis is restricted to linear elastic behavior, omitting nonlinear effects such as finite strain elasticity, plasticity, and viscoelasticity, which are critical for practical applications under high loads or dynamic conditions. Third, due to the scarcity of direct experimental measurements for nanoporous materials at the nanoscale, our predictions rely on surface parameters from molecular dynamics simulations27,43 and indirect validation through related studies, potentially overlooking real-world variability. Finally, while our parametric analysis covers key parameters (porosity, void size, surface properties), the scope of numerical results remains modest, and further exploration of additional parameters could enhance the depth of insights. These limitations highlight opportunities for refining the model’s practical relevance.
Perspectives
Future research may address these limitations to enhance the applicability and impact of the Steigmann–Ogden framework for nanoporous materials. First, one may extend the model to incorporate non-spherical void shapes and polydisperse void size distributions, such as bimodal populations, using computational homogenization techniques to better reflect real material systems. Second, one may aim to develop nonlinear Steigmann–Ogden-based constitutive relations to account for finite strain elasticity, plasticity, and viscoelasticity, potentially employing RVE-based methods to construct yield surfaces for comprehensive mechanical characterization. Third, one may collaborate with experimentalists to conduct direct measurements, such as nanoindentation or ultrasonic testing, to validate elastic moduli predictions and refine surface parameters beyond existing molecular dynamics data. Fourth, one may expand parametric studies to include a broader range of surface properties and material types, supplemented by detailed comparisons with other theoretical models and experimental data, to deepen the robustness of parametric analysis. These efforts will build on the current study’s analytical foundation, advancing the design of lightweight nanoporous materials with tailored mechanical properties for aerospace, energy storage, and other applications.
Data availability
The data generated or analyzed during this study are available from the corresponding author upon reasonable request.
Abbreviations
- \(\varvec{\sigma }\) :
-
Cauchy stress tensor
- \(\varvec{\tau }\) :
-
Surface stress tensor
- \(\textbf{M}\) :
-
Bending moment tensor
- \({\varepsilon }_{ij}^\textrm{s}\) :
-
Surface strain tensor
- \(\kappa _{ij}\) :
-
Surfaceslope change tensor
- \(\textbf{T}\) :
-
Surface projection tensor
- \(\textbf{N}\) :
-
Normal projection tensor
- \(E_{ij}\) :
-
Macroscopic strain
- \(\Sigma _{ij}\) :
-
Macroscopic stress
- \(\overline{\varepsilon }_{ij}\) :
-
Average strain
- \(\overline{\sigma }_{ij}\) :
-
Average stress
- \(\overline{\kappa }\) :
-
Equivalent bulk modulus
- \(\overline{\mu }\) :
-
Equivalent shear modulus
- \(\kappa _{\text {s}}\) :
-
Surface elastic constants
- \(\mu _0,\ \lambda _{0}\) :
-
Surface Lamé constants
- \(\eta _{\text {s}}\) :
-
Surface bending stiffness
- \(\xi _0,\ \chi _0\) :
-
Surface bending parameters
- f :
-
Porosity
- \(\kappa _{1,2}\) :
-
Bulk modulus of matrix
- \(\mu _{1,2}\) :
-
Shear modulus of matrix
References
Thommes, M. & Schlumberger, C. Characterization of nanoporous materials. Annu. Rev. Chem. Biomol. Eng. 12, 137–162 (2021).
Hakamada, M. & Mabuchi, M. Fabrication, microstructure, and properties of nanoporous Pd, Ni, and their alloys by dealloying. Crit. Rev. Solid State Mater. Sci. 38, 262–285 (2013).
Detavernier, C., Dendooven, J., Pulinthanathu Sree, S., Ludwig, K. F. & Martens, J. A. Tailoring nanoporous materials by atomic layer deposition. Chem. Soc. Rev. 40, 5242–5253 (2011).
Cychosz, K. A., Guillet-Nicolas, R., García-Martínez, J. & Thommes, M. Recent advances in the textural characterization of hierarchically structured nanoporous materials. Chem. Soc. Rev. 46, 389–414 (2017).
Jin, H. J., Weissmuller, J. & Farkas, D. Mechanical response of nanoporous metals: A story of size, surface stress, and severed struts. MRS Bull. 43, 35–42 (2018).
Huang, C.-L., Lin, Z.-Z., Feng, Y.-H., Zhang, X.-X. & Wang, G. Thermal conductivity prediction of 2-dimensional square-pore metallic nanoporous materials with kinetic method approach. Int. J. Therm. Sci. 112, 263–269 (2017).
Jiao, L., Seow, J. Y. R., Skinner, W. S., Wang, Z. U. & Jiang, H.-L. Metal–organic frameworks: Structures and functional applications. Mater. Today 27, 43–68 (2019).
Huang, A. et al. A review of recent applications of porous metals and metal oxide in energy storage, sensing and catalysis. J. Mater. Sci. 54, 949–973 (2019).
Bag, J., Mukherjee, S. & Karati, D. Recent advancement of nanostructured materials: A compatible therapy of tissue engineering and drug delivery system. Polym. Bull. 81, 5679–5702 (2024).
Gurtin, M. E. & Murdoch, A. I. A continuum theory of elastic material surfaces. Arch. Ration. Mech. Anal. 57, 291–323 (1975).
Gurtin, M. E. & Murdoch, A. I. Surface stress in solids. Int. J. Solids Struct. 14, 431–440 (1978).
Sharma, P., Ganti, S. & Bhate, N. Effect of surfaces on the size-dependent elastic state of nano-inhomogeneities. Appl. Phys. Lett. 82, 535–537 (2003).
He, L. & Li, Z. Impact of surface stress on stress concentration. Int. J. Solids Struct. 43, 6208–6219 (2006).
Kushch, V. I., Mogilevskaya, S. G., Stolarski, H. K. & Crouch, S. L. Elastic fields and effective moduli of particulate nanocomposites with the Gurtin-Murdoch model of interfaces. Int. J. Solids Struct. 50, 1141–1153 (2013).
Mi, C. & Kouris, D. Stress concentration around a nanovoid near the surface of an elastic half-space. Int. J. Solids Struct. 50, 2737–2748 (2013).
Dong, L., Wang, J., Yan, P. & Guo, Z. A Trefftz collocation method for multiple interacting spherical nano-inclusions considering the interface stress effect. Eng. Anal. Bound. Elem. 94, 172–183 (2018).
Dormieux, L. & Kondo, D. An extension of Gurson model incorporating interface stresses effects. Int. J. Eng. Sci. 48, 575–581 (2010).
Dormieux, L. & Kondo, D. Non linear homogenization approach of strength of nanoporous materials with interface effects. Int. J. Eng. Sci. 71, 102–110 (2013).
Zheng, C., Zhang, G. & Mi, C. On the strength of nanoporous materials with the account of surface effects. Int. J. Eng. Sci. 160, 103451 (2021).
Duan, H., Wang, J., Huang, Z. & Karihaloo, B. Size-dependent effective elastic constants of solids containing nano-inhomogeneities with interface stress. J. Mech. Phys. Solids 53, 1574–1596 (2005).
Chen, T., Dvorak, G. J. & Yu, C. C. Size-dependent elastic properties of unidirectional nano-composites with interface stresses. Acta Mech. 188, 39–54 (2006).
Duan, H., Yi, X., Huang, Z. & Wang, J. A unified scheme for prediction of effective moduli of multiphase composites with interface effects. Part I: Theoretical framework. Mech. Mater. 39, 81–93 (2007).
Doan, T., Le-Quang, H. & To, Q.-D. Effective elastic stiffness of 2D materials containing nanovoids of arbitrary shape. Int. J. Eng. Sci. 150, 103234 (2020).
Yin, S. & Pindera, M.-J. Hybrid homogenization theory with surface effects: Application to columnar nanoporous materials. Eur. J. Mech. A. Solids 101, 105050 (2023).
Steigmann, D. J. & Ogden, R. W. Plane deformations of elastic solids with intrinsic boundary elasticity. Proc. R. Soc. Lond. A Math. Phys. Eng. Sci. 453, 853–877 (1997).
Steigmann, D. J. & Ogden, R. W. Elastic surface-substrate interactions. Proc. R. Soc. Lond. A Math. Phys. Eng. Sci. 455, 437–474 (1999).
Chhapadia, P., Mohammadi, P. & Sharma, P. Curvature-dependent surface energy and implications for nanostructures. J. Mech. Phys. Solids 59, 2103–2115 (2011).
Eremeyev, V. A. & Lebedev, L. P. Mathematical study of boundary-value problems within the framework of Steigmann-Ogden model of surface elasticity. Continuum Mech. Thermodyn. 28, 407–422 (2016).
Zemlyanova, A. Y. & Mogilevskaya, S. G. Circular inhomogeneity with Steigmann-Ogden interface: Local fields, neutrality, and Maxwell’s type approximation formula. Int. J. Solids Struct. 135, 85–98 (2018).
Zemlyanova, A. Y. & Mogilevskaya, S. G. On spherical inhomogeneity with Steigmann-Ogden interface. J. Appl. Mech.-Trans. ASME 85, 121009 (2018).
Mogilevskaya, S. G., Kushch, V. I. & Zemlyanova, A. Y. Displacements representations for the problems with spherical and circular material surfaces. Q. J. Mech. Appl. Mech. 72, 449–471 (2019).
Wang, J., Yan, P., Dong, L. & Atluri, S. N. Spherical nano-inhomogeneity with the Steigmann-Ogden interface model under general uniform far-field stress loading. Int. J. Solids Struct. 185–186, 311–323 (2020).
Ban, Y., Li, X., Li, L. & Mi, C. On the stress analysis around a nanoinhomogeneity embedded in a half-space with the account of Steigmann-Ogden interface effects. Appl. Math. Model. 98, 378–397 (2021).
Gao, M., He, Z., Ahehehinnou, O. A. & Wang, G. Far-field analytical solution of composite materials considering Steigmann-Ogden surface. Acta. Mech. Sin. 40, 123196 (2024).
Wu, B. & Ye, W. Effective elastic properties of nanofiber-reinforced composites with Steigmann-Ogden interface effect. Mech. Mater. 181, 104662 (2023).
Ye, W. Steigmann-Ogden interface effect on the effective elastic properties of nanoparticle-reinforced composites: From nanocomposites to nanoparticles. Int. J. Solids Struct. 280, 112408 (2023).
Zhang, Y., Cai, J., Cai, Q., Wang, L. & Gou, X. Strength and energy absorption characteristic of nanoparticle-reinforced composites considering interface curvature dependence. Compos. Struct. 360, 119036 (2025).
Zheng, C. & Mi, C. On the macroscopic strength criterion of ductile nanoporous materials. Int. J. Eng. Sci. 162, 103475 (2021).
Zheng, C., Song, R. & Mi, C. On the yield criterion of two-scale porous materials by using Eshelby-type velocity field and Steigmann-Ogden surface model. Mech. Mater. 176, 104519 (2023).
Huang, Y., Yan, P., Wang, J., Dong, L. & Atluri, S. N. Eshelby tensors and overall properties of nano-composites considering both interface stretching and bending effects. J. Micromech. Mol. Phys. 7, 49–59 (2022).
Gurtin, M. E., Weissmuller, J. & Larche, F. A general theory of curved deformable interfaces in solids at equilibrium. Philos. Mag. 78, 1093–1109 (1998).
Barber, J. R. Elasticity Third Revised Edition (Springer, 2010).
Miller, R. E. & Shenoy, V. B. Size-dependent elastic properties of nanosized structural elements. Nanotechnology 11, 139–147 (2000).
Funding
We gratefully acknowledge the support from the National Natural Science Foundation of China [grant number U23A2044]
Innovation Project of Huadong Engineering Corporation Limited [grant number KY2024-ZD-06].
Author information
Authors and Affiliations
Contributions
C.Z. and C.M. wrote the main manuscript text and X.G., W.C., C.W., G.L., J.M., and F.X. prepared figures 1-8. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Zheng, C., Ge, X., Chu, W. et al. On the macroscopic elastic moduli of nanoporous materials with surface tensile and bending rigidity. Sci Rep 15, 44398 (2025). https://doi.org/10.1038/s41598-025-28867-w
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-28867-w
