
Abstract
The objective of this article is to model and analyze unsteady squeezing flow of fractional MHD Casson fluid through a porous channel. Casson fluid model is significant in understanding the properties of non-Newtonian fluids such as blood flows, printing inks, sauces and toothpaste etc. This study provides important results as unsteady flow of Casson fluid in fractional sense with aforementioned effects has not been captured in existing literature. After applying similarity transformations along with fractional calculus a highly non-linear fractional-order differential equation is obtained. Modeled equation is then solved along with no-slip boundary conditions through a hybrid of Laplace transform with homotopy perturbation algorithm. For validity purposes, solution and errors at various values in fractional domain are compared with existing results. LHPM results are better in terms of accuracy than other available results in literature. Effects of fractional parameter on the velocity profile, skin friction and behaviors of involved fluid parameters is the focal point of this study. Comprehensive, quantitative and graphical analysis is performed for investigating the effects of pertinent fluid parameters on the velocity profile and skin friction. Analysis revealed that fractional parameter depicts similar effect in case of positive and negative squeeze number. Also, skin friction decreases with an increasing fractional parameter. Moreover, in fractional environment Casson parameter has shown similar effect on the velocity profile in case of positive and negative squeeze number.
Similar content being viewed by others
Introduction
Fractional calculus deals with non-integer order derivatives and integrals. In 1695, concept of fractional differentiation emerged when L’Hospital sent a letter to Leibniz asking about 1/2th order derivative. Many well-known mathematicians such as Riemann1, Liouville2, Abel3, Euler4, Laurent5, Laplace6, and Hardy7,8 played a vital role in the foundation of fractional calculus. This area of mathematics acquired attention in late twenties due to its vast industrial applications. In 1974, first international conference on fractional calculus was held and in the same year first textbook dedicated to this field was published9. Fractional calculus has variety of important roles in various fields of science and engineering such as diffusion procedures, geochemistry, viscoelasticity, and bio-engineering etc. It is also an efficient way to model complex problems such as fluid flow, electromagnetic theory, decentralized wireless networks, biology, physics, micro-grids etc. In literature, many fractional order derivatives were proposed to solve real world problems of different fields10,11,12,13. In recent years, mathematical models with fractional order derivatives gathered a lot of attention because they provide a better fit to the real data as compared to integer-order models14,15,16,17,18. This is observed in fractional order modeling of biological systems which provides a much deeper understanding of the complex behavioral patterns of many infectious diseases like avian influenza19, dengue fever20, malaria21, TB22 and Hepatitis B23 etc.
In fluid dynamics, squeezing flow between parallel plates is considered to be an important due to its involvement in many applications models24,25,26,27,28. This type of flow is similar to the principal of moving pistons in heavy mechanical machinery. Applications of these flows can be seen in automobile engines, hydraulic machinery, and food industry etc. models29,30,31,32. Another important example is patterns in fluid flow. These patterns are usually classified into turbulent, transitional and laminar flows. In research community, the effects of these behaviors on non-Newtonian fluids have proved to be a significant challenge. The study of magneto-hydrodynamic (MHD) effect, which is related to fluid behavior under applied magnetic field, has been a crucial topic of interest in fluid flow. Some examples of fluids that follows MHD effect are plasmas, electrolytes, salt water, etc. Due to its diverse behavior in different fields of science like geophysics, cooling systems, MHD generators, etc., many researchers take interest in it models33,34,35. In current study, a non-Newtonian Casson fluid model36,37 is taken, which is able to capture complex rheological properties of different concentrated fluids like syrups, toothpaste, juices, printing inks, honey etc. Casson fluid is interpreted as a shear thinning liquid which is usually assumed to have infinite viscosity at zero rate of shear, and no flow occurs below its yield stress38,39,40.
Due to presence of fractional derivatives and non-linearity of the models, exact solutions are rare. Hence, numerical or semi-numerical approach is required for prediction and analysis instead of analytical approaches41. Usually for boundary value problems (BVPs), perturbation techniques are used, but due to presupposition of some small or large parameters, these techniques are insufficient for complex phenomena. Considering this fact, Prof. He merged perturbation tools with homotopy, and named it homotopy perturbation method (HPM)42. This scheme is then applied by many researchers in different fields of science and engineering43,44,45. In order to reduce errors and improve the efficiency of classical HPM, different modifications are also proposed by researchers. Few of the recent alterations of HPM can be seen in46,47,48. Among these modifications, one is Laplace homotopy perturbation method (LHPM) which is obtained by combining HPM with Laplace transform. Laplace transform is much important in finding the solutions of differential equations. Better accuracy is achieved by combining Laplace transform with HPM. Moreover, it provides convergent series solution without discretization and hence can be easily applicable to wide variety of problems LHPM was introduced by Johnston49 for finding the solutions of fractional Burger equations. Li and Nadeem used He-Laplace method in shallow water waves50. In this paper, authors extend this method to solve and analyze unsteady squeezing flow of fractional Casson fluid model with MHD and porosity effects. The objective of this paper is to investigate the effect of fractional parameter on fluid velocity, skin friction and different fluid parameters (\(\beta ,{M}_{g},{M}_{p},{S}_{q}\)). Moreover, effect of fluid parameters (\(\beta ,{M}_{g},{M}_{p},{S}_{q}\)) on the velocity profile in fractional and integral environment is also investigated in this study.
In rest of the paper, “Mathematical formulation” and “Laplace homotopy perturbation method for fractional differential equations” sections consists of mathematical formulation and basic idea of LHPM for fractional order boundary value problem respectively, “Application of LHPM to fractional squeezing of Casson fluid” section consists of application of LHPM to fractional squeezing of Casson fluid, “Results and discussion” section presents results and discussion while conclusion is given in “Conclusion” section.
Basic definitions
Definition 1
The Laplace transform \(\mathfrak{L}[\mathcal{U}(\zeta )]\) of Riemann–Liouville fractional integral \({\mathfrak{I}}^{\alpha }\)51 is given as follows49:
Definition 2
The Laplace transform \(\mathfrak{L}[\mathcal{U}(\zeta )]\) of Caputo’s fractional derivative \({\mathfrak{D}}^{\alpha }\)51 is given as follows:
Mathematical formulation
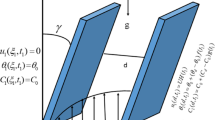
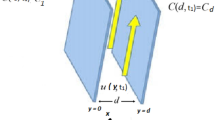
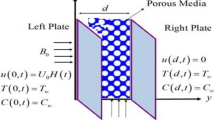
Consider an in-compressible flow of Casson fluid between two plates that are initially at the distance \(\mathcalligra{l}\). At time \(t\), the distance between these two plates is \(\widetilde{z}=\pm \mathcalligra{l}\,\,(1-\gamma t{)}^{1/2}=\pm \widetilde{h}(t)\). Suppose \(\gamma\) is the squeezing or receding motion of the plates. \(\gamma >0\) corresponds to a squeezing while \(\gamma <0\) represents the receding motion of the plates. This phenomena is of much importance in literature as it is equivalent to the blood flow through arteries, heart and squeeze motion of lungs etc.52,53,54. \(t=\frac{a}{\gamma }\) is the time when both plates touch each other. Considering these conditions, the non-Newtonian Casson model55 is
where \({\tau }_{ij}\) and \({e}_{ij}\) are the (i,j)th component of stress tensor and deformation rate respectively, \({\pi }_{c}\) being the critical value of the product \(\pi ={e}_{ij}{e}_{ij}\), \({\mu }_{A}\) represents plastic dynamic viscosity and \({p}_{y}\) showing the yield stress. A constant magnetic field is applied perpendicular to the surface. Flow model is then designed by neglecting the effects of induced fields and no external electric field is nearby. The continuity and momentum equations governing equations of the concerned model are as follows56:
where velocity component in x and y direction are \({\widetilde{u}}_{x}\) and \({\widetilde{u}}_{y}\) respectively, \(`p\) is pressure, \(\mu\) and \(\nu\) are dynamic and kinematic viscosities of the fluid respectively, \(\beta\)=\({\mu }_{A}\sqrt{2\pi /{p}_{y}}\) is the Casson fluid parameter, \(\mathcal{B}\) and \(k\) are imposed magnetic field and permeability constant respectively.
Boundary conditions for the problem are:
By cross differentiating (5) and (6) gives the following
where
Wang’s57 similarity transforms for 2D flow are
where
Now by substituting (10) into (8), we have
where \({S}_{q}=\frac{\gamma {l}^{2}}{2v}\), \({M}_{g}=\frac{\sigma {\mathcal{B}}^{2}{l}^{2}(1-\gamma t)}{\rho v}\) and \({M}_{p}=\frac{v(1-\gamma t)}{k\gamma }\) are Squeeze, magnetic and permeability parameters respectively. \({S}_{q}<0\) represents that the plates are drawing closer to each other whereas, \({S}_{q}>0\) represents than they are moving farther apart. Using (10), transformed BCs are
For \(\beta \to \infty\), and \({M}_{g}={M}_{p}\) = 0, problem reduces to the one discussed in57.
Skin friction coefficient in this case is58
In terms of (10), we have
where
In next step, after applying fundamentals of fractional calculus, (11) reduced to the following fractional order differential equation
where the fractional parameter has range \(3<\alpha \le 4\). Equation (15) has the same boundary conditions as in Eq. (12) (Table 1).
Laplace homotopy perturbation method for fractional differential equations
To illustrate the basic idea of LHPM59, consider a general non-linear fractional order differential equation:
where \({\mathfrak{D}}^{\alpha }[\mathcal{U}(\mathfrak{v})]\) represents the fractional derivative of an unknown function \(\mathcal{U}(\mathfrak{v})\), \(\mathfrak{g}\)(\(\mathfrak{v}\)) is a known function, \(\mathfrak{R}\) and \(\mathcal{N}\) are linear and non-linear operators respectively. For nth order BVPs, dummy initial conditions are needed to be considered at the start to initialize the solution process.
After considering dummy initial conditions, first step is to apply Laplace transform to both sides of (16), which give the following
By using differential property of Laplace transform, we have
or
In next step of the algorithm, we need to construct a homotopy \(\mathcal{V}(\mathfrak{v};\mathfrak{p}):\Omega\) x [0,1] \(\to \mathcal{R}\) which satisfies
where \({\mathcal{U}}_{0}\) is the initial guess which satisfies the given conditions. For \(\mathfrak{p}\) = 0 in 20, we have
and for \(\mathfrak{p}\) = 1 in 20 gives the following
By expanding \(\mathcal{V}(\mathfrak{v};\mathfrak{p})\) in terms of Taylor series as:
and substituting in Eq. (20), and comparing the coefficients of same powers of \(\mathfrak{p}\) leads us to different order problems. The zeroth order problem is:
Use of inverse Laplace transform will give the following
First order problem is
Application of inverse Laplace transform leads to
Similarly second order problem is
Use of inverse Laplace transform give the following
continuing this way, we can get higher order problems and their solutions. The approximate solution of the general fractional order, non-linear differential equation is
Since dummy constants are introduced at the start of solution process in case of BVPs. Right boundary conditions will use for finding optimal values of dummies. The block diagram of LHPM procedure is given above in Fig. 1. Residual error can be found by substituting approximate solution in concerned differential equation as

Block diagram of LPHM procedure.
Application of LHPM to fractional squeezing of Casson fluid
Firstly, apply Laplace transform on both sides of (15) as
Utilization of differential property of Laplace transform gives the following form
In next step, construct a homotopy using (15) as
Further, by expanding \(\mathcal{U}(\zeta )\) as a Taylor series, and comparing the coefficients of like powers of \(\mathfrak{p}\) will give different order problems as follows:
Zeroth-order deformation
First-order deformation
mth-order deformation
Application of inverse Laplace transform on the above-mentioned problems will lead to \({\mathcal{U}}_{0},{\mathcal{U}}_{1},{\mathcal{U}}_{2}\) \(\cdots\)
Thus, approximate solution is
It is to note that, optimal values of unknown dummy conditions \({a}_{1} \; \; \mathrm{and} \; \; {a}_{2}\) be determined by using right boundary conditions from (12). After this, putting obtained solution back to (15) for obtaining residual function:
Results and discussion
In this article, unsteady squeezing flow of Casson fluid passing through a porous medium is considered in fractional space. An acquired highly nonlinear boundary value problem is solved and analyzed with respect to fractional parameter α,\(3<\alpha \le 4\), which was introduced because of fractional environment. Main focus of the paper is to investigate the effect of fractional parameter on fluid velocity and skin friction. Moreover, comparative analysis of the behaviors of different fluid parameters (\(\beta ,{M}_{g},{M}_{p},{S}_{q}\)) on the velocity profiles in fractional and integral environment is the second aspect of this investigation. Modeled problem is solved using Laplace transform with homotopy perturbation for above-mentioned parameters, and obtained results are compared with HPM. Table 2 and 3 show LHPM solutions and errors for different values of \(\alpha\) when squeeze number \({S}_{q}\) is negative and positive respectively. Tables 4, 5, 6, 7 provide the comparison of LHPM results with HPM. Analysis of these tables reveals that LHPM results are consistent and are better than HPM. Moreover, skin friction for fixed values of fluid parameters in fractional scenario is also determined in this study, and numerical results are presented in Table 1. It is observed that skin friction decreases with an increase in \(\alpha\), for positive and negative squeeze number.
Beside numerical analysis of the results, validity of the obtained solution is confirmed by comparing it with existing solution which can be seen in Fig. 2. Also, effects of different fluid parameters on the velocity profile are similar graphically in fractional environment for the cases of positive squeeze numbers (plates are moving farther apart from each other) and negative squeeze numbers (plates are moving towards each other). It has also been observed that Casson parameter shows opposite behavior in fractional and integral domain when squeeze number is negative. Rest of the parameters are showing similar behavior in fractional and integral scenarios56. Figures 3 and 4 demonstrate the effect of fractional parameter on the velocity profile in both cases when the distance between plates is increasing or decreasing. It is observed that fractional parameter showed similar effect in both the cases. It is seen that normal velocity increases with an increase of fractional parameter whereas the radial velocity increases when \(\zeta \in (0.0.5)\) and decreases onward. Effect of negative and positive squeeze number \({S}_{q}\) on the velocity profile in fractional environment is displayed in Figs. 5 and 6 respectively. . It is seen that in case of negative \({S}_{q}\), normal velocity increases with an increase in negative \({S}_{q}\) while radial velocity increases when \(\zeta \in (\mathrm{0,0.5})\) and decreases onward. Opposite behavior is recorded when positive \({S}_{q}\) (see Fig. 6).

Comparison of LHPM and HPM56 solutions when \(\alpha =4\), \({S}_{q}=-0.4\), \(\beta =1.0\), \({M}_{g}=0.5\) and \({M}_{p}=0.5\).

Effect of fractional parameter \(\alpha\) on the velocity profile when \({S}_{q}\) is negative i.e. \({S}_{q}=-1\), and \({M}_{g}=3,{M}_{p}=3.5\) and \(\beta =4\) are fixed.

Effect of fractional parameter \(\alpha\) on the velocity profile when \({S}_{q}\) is positive i.e. \({S}_{q}=5\), and \({M}_{g}=3,{M}_{p}=3.5\) and \(\beta =0.5\) fixed.

Effect of negative squeeze number \({S}_{q}\) on the velocity profile with \(\alpha =3.6\), \({M}_{g}=0.9\), \({M}_{p}=0.8\) and \(\beta =0.5\).

Effect of positive squeeze number \({S}_{q}\) on the velocity profile with \(\alpha =3.6\), \({M}_{g}=0.9\), \({M}_{p}=0.8\) and \(\beta =0.5.\)
Effect of magnetohydrodynamic parameter \({M}_{g}\) on normal and radial velocity in case of positive and negative squeeze number is given in Figs. 7 and 10 respectively in fractional environment. Under increasing magnetic force, Lorentz like drag force increases which decreases velocity. It is observed that increasing magnetic effect shows similar behavior in both squeezing or receding case. It is observed that normal velocity decreases with an increase in \({M}_{g}\) while radial velocity decreases when \(\zeta \in (\mathrm{0,0.5})\) and increases onward. Similar effects are reported in rest of the fluid parameters (i.e. \({M}_{p},\beta\)) in fractional environment See (Figs. 8, 9, 10, 11, 12). It is observed that \({M}_{p}\) and \(\beta\) are behaving similarly (like \({M}_{g}\)) on the normal and radial components of velocity whether \({S}_{q}\) is negative or positive.

Effect of MHD parameter \({M}_{g}\) on the velocity when \({S}_{q}\) is negative i.e. \({S}_{q}=-0.3\), \(\alpha =3.6\), \({M}_{p}=0.6\) and \(\beta =5\).

Effect of permeability parameter \({M}_{p}\) on the velocity when \({S}_{q}\) is negative i.e. \({S}_{q}=-0.3\), \(\alpha =3.6\), \({M}_{g}=0.7\) and \(\beta =5\).

Effect of Casson parameter \(\beta\) on the velocity when \({S}_{q}\) is negative i.e. \({S}_{q}=-0.3\), \(\alpha =3.6\), \({M}_{g}=10\) and \({M}_{p}=10\).

Effect of MHD parameter \({M}_{g}\) on the velocity when \({S}_{q}\) is positive i.e. \({S}_{q}=0.3\), \(\alpha =3.6\), \({M}_{p}=0.6\) and \(\beta =5\).

Effect of permeability parameter \({M}_{p}\) on the velocity when \({S}_{q}\) is positive i.e. \({S}_{q}=0.3\), \(\alpha =3.6\), \({M}_{g}=0.7\) and \(\beta =5\).

Effect of Casson parameters \(\beta\) on the velocity profile when \({S}_{q}\) is positive i.e. \({S}_{q}=0.3\), \(\alpha =3.6\), \({M}_{g}=10\) and \({M}_{p}=10\).
Conclusion
This article is based on fractional analysis of unsteady squeezing flow of MHD Casson fluid passing through a porous channel. Obtained highly non-linear fractional order boundary value problem is solved using Laplace transform along with homotopy perturbation. For validity of the obtained results, residual errors are calculated in fractional and integral environments. Moreover, obtained results shows good agreement with available solutions from the literature. It is also noted that LHPM provides better accuracy than existing results in literature, therefore, it can be extended to other non-Newtonian fluid models such as Oldryod 6, Carreau and Sutterby fluid etc. Moreover, Casson fluid model in fractional calculus can be studied at various boundary conditions of fluid solid interface. Analysis of the concerned model leads to the following key findings:
-
Skin friction decreases with an increase in fraction parameter.
-
Fractional parameters behave similarly on the velocity profile in case of negative and positive squeeze number.
-
Effects of various fluid parameters in fractional space are analyzed graphically and it is observed that, Casson parameter is the only one who behave differently in fractional and integral environment, i.e. Casson parameter showed similar effect in fractional environment for negative and positive squeeze number but has shown opposite effects in integral environment.
The Homotopy Perturbation method could be applied to a variety of physical and technical challenges in the future60,61,62,63,64,65,66,67,68,69,70,71. Some recent developments exploring the significance of the considered research domain are reported by72,73,74,75,76,77,78,79,80,81.
Data availability
All data generated or analyzed during this study are included in this published article.
References
Riemann, B. Versuch einer allgemeinen auffassung der integration und differentiation. Gesammelte Werke 62, 1876 (1876).
Liouville, J. Memoir on some questions of geometry and mechanics, and on a new kind of calculation to solve these questions. J. de l’E’cole Pol. Tech 13, 1–69 (1832).
Abel, N. Solution de quelques probl`emes `a l’aide d’int´egrales d´efinies. Oeuvres 1, 11–27 (1881).
Euler, L. On transcendental progressions that is, those whose general terms cannot be given algebraically. Commentarii academiae scientiarum Petropolitanae 1738(5), 36–57 (1999).
Laurent, H. Sur le calcul des derivees `a indices quelconques. Nouvelles annales de math´ematiques: journal des candidats aux ´ecoles polytechnique et normale 3, 240–252 (1884).
de Laplace, P. S. Theorie analytique des probabilites, Vol. 7 (Courcier, 1820).
Hardy, G. H. & Littlewood, J. E. Some properties of fractional integrals. I. Math. Z. 27(1), 565–606 (1928).
Hardy, G. H. & Littlewood, J. E. Some properties of fractional integrals. II. Math. Z. 34(1), 403–439 (1932).
Oldham, K. B. & Spanier, J. The Fractional Calculus (Academic Press, 1974).
Qayyum, M. et al. An application of homotopy perturbation method to fractional-order thin film flow of the Johnson-Segalman fluid model. Math. Probl. Eng. 2022, 1–17 (2022).
Khan, N. A., Ibrahim Khalaf, O., Andrés Tavera Romero, C., Sulaiman, M. & Bakar, M. A. Application of intelligent paradigm through neural networks for numerical solution of multiorder fractional differential equations. Comput. Intell. Neurosci. 2022, 1–16 (2022).
Liu, Q. et al. Uncertain currency option pricing based on the fractional differential equation in the Caputo sense. Fract. Fract. 6(8), 407 (2022).
Nisar, K. S. et al. On beta-time fractional biological population model with abundant solitary wave structures. Alex. Eng. J. 61(3), 1996–2008 (2022).
Ge-JiLe, H., Rashid, S., Noor, M. A., Suhail, A. & Chu, Y. M. Some unified bounds for exponentially convex functions governed by conformable fractional operators. AIMS Math. 5(6), 6108–6123 (2020).
Abdeljawad, T., Rashid, S., Hammouch, Z., İşcan, İ & Chu, Y. M. Some new Simpson-type inequalities for generalized p-convex function on fractal sets with applications. Adv. Diff. Equ. 1, 2020 (2020).
Rashid, S., Chu, Y. M., Singh, J. & Kumar, D. A unifying computational framework for novel estimates involving discrete fractional calculus approaches. Alex. Eng. J. 60(2), 2677–2685 (2021).
Zhou, S. S., Rashid, S., Parveen, S., Akdemir, A. O. & Hammouch, Z. New computations for extended weighted functionals within the Hilfer generalized proportional fractional integral operators. AIMS Math. 6(5), 4507–4525 (2021).
Rashid, S., Abouelmagd, E. I., Sultana, S. & Chu, Y. M. New developments in weighted N-fold type inequalities via discrete generalized proportional fractional operators. Fractals 30(02), 2240056 (2022).
Ye, X. & Xu, C. A fractional order epidemic model and simulation for avian influenza dynamics. Math. Methods Appl. Sci. 42(14), 4765–4779 (2019).
Jajarmi, A., Arshad, S. & Baleanu, D. A new fractional modelling and control strategy for the outbreak of dengue fever. Phys. A 535, 122524 (2019).
ul Rehman, A., Singh, R., Abdeljawad, T., Okyere, E. & Guran, L. Modeling, analysis and numerical solution to malaria fractional model with temporary immunity and relapse. Adv. Diff. Equ. 2021(1), 1–27 (2021).
Carvalho, A. R. M. & Pinto, C. M. A. Non-integer order analysis of the impact of diabetes and resistant strains in a model for TB infection. Commun. Nonlinear Sci. Numer. Simul. 61, 104–126 (2018).
Ullah, S., Altaf Khan, M. & Farooq, M. A new fractional model for the dynamics of the hepatitis b virus using the Caputo-Fabrizio derivative. Eur. Phys. J. Plus 133(6), 1–14 (2018).
Qayyum, M. et al. On behavioral response of 3D squeezing flow of nanofluids in a rotating channel. Complexity 1–16, 2020 (2020).
Varun Kumar, R. S., GunderiDhananjaya, P., Naveen Kumar, R., Punith Gowda, R. J. & Prasannakumara, B. C. Modeling and theoretical investigation on Casson nanofluid flow over a curved stretching surface with the influence of magnetic field and chemical reaction. Int. J. Comput. Methods Eng. Sci. Mech. 23(1), 12–19 (2021).
Madhukesh, J. K. et al. Physical insights into the heat and mass transfer in Casson hybrid nanofluid flow induced by a Riga plate with thermophoretic particle deposition. Proc. Inst. Mech. Eng. Part E J. Process Mech. Eng. 095440892110393 (2021).
Naveen Kumar, R., Punith Gowda, R. J., Madhukesh, J. K., Prasannakumara, B. C. & Ramesh, G. K. Impact of thermophoretic particle deposition on heat and mass transfer across the dynamics of Casson fluid flow over a moving thin needle. Phys. Scripta 96(7), 075210 (2021).
Punith Gowda, R. J., Rauf, A., Naveen Kumar, R., Prasannakumara, B. C. & Shehzad, S. A. Slip flow of Casson Maxwell nanofluid confined through stretchable disks. Indian J. Phys. 96(7), 2041–2049 (2021).
Sarada, K., Gowda, R. J., Sarris, I. E., Kumar, R. N. & Prasannakumara, B. C. Effect of magnetohydrodynamics on heat transfer behavior of a non-Newtonian fluid flow over a stretching sheet under local thermal nonequilibrium condition. Fluids 6(8), 264 (2021).
Punith Gowda, R. J., Naveen Kumar, R., Prasannakumara, B. C., Nagaraja, B. & Gireesha, B. J. Exploring magnetic dipole contribution on ferromagnetic nanofluid flow over a stretching sheet: An application of Stefan blowing. J. Mol. Liq. 335, 116215 (2021).
Gowda, R. J. P. et al. Computational modelling of nanofluid flow over a curved stretching sheet using Koo-Kleinstreuer and Li (KKL) correlation and modified Fourier heat flux model. Chaos Solitons Fract 145, 110774 (2021).
Kumar, R. N. et al. Impact of magnetic dipole on thermophoretic particle deposition in the flow of Maxwell fluid over a stretching sheet. J. Mol. Liq. 334, 116494 (2021).
Mahabaleshwar, U. S., Sneha, K. N. & Huang, H. N. An effect of MHD and radiation on CNTS-water based nanofluids due to a stretching sheet in a Newtonian fluid. Case Stud. Therm. Eng. 28, 101462 (2021).
Ahmad, F. et al. MHD thin film flow of the Oldroyd-B fluid together with bioconvection and activation energy. Case Stud. Therm. Eng. 27, 101218 (2021).
Zhou, J. C. et al. Unsteady radiative slip flow of MHD Casson fluid over a permeable stretched surface subject to a non-uniform heat source. Case Stud. Therm. Eng. 26, 101141 (2021).
Qayyum, M., Khan, H. & Khan, O. Slip analysis at fluid-solid interface in MHD squeezing flow of Casson fluid through porous medium. Results Phys. 7, 732–750 (2017).
Asjad, M. I., Butt, M. H., Sadiq, M. A., Ikram, M. D. & Jarad, F. Unsteady Casson fluid flow over a vertical surface with fractional bioconvection. AIMS Math. 7(5), 8112–8126 (2022).
Jyothi, A. M., Naveen Kumar, R., Punith Gowda, R. J. & Prasannakumara, B. C. Significance of Stefan blowing effect on flow and heat transfer of Casson nanofluid over a moving thin needle. Commun. Theor. Phys. 73(9), 095005 (2021).
Punith Gowda, R. J., Naveen Kumar, R., Jyothi, A. M., Prasannakumara, B. C. & Sarris, I. E. Impact of binary chemical reaction and activation energy on heat and mass transfer of Marangoni driven boundary layer flow of a non-Newtonian nanofluid. Processes 9(4), 702 (2021).
Hamid, A., Khan, M. I., Kumar, R. N., Gowda, R. P. & Prasannakumara, B. C. Numerical study of bio-convection flow of magneto-cross nanofluid containing gyrotactic microorganisms with effective Prandtl number approach. Sci. Rep. 11, 16030 (2021).
Lashin, M. et al. Magnetic field effect on heat and momentum of fractional maxwell nanofluid within a channel by power law kernel using finite difference method. Complexity 2022, 1–16 (2022).
He, J. H. Homotopy perturbation technique. Comput. Methods Appl. Mech. Eng. 178(3–4), 257–262 (1999).
He, J. H. Homotopy perturbation method for solving boundary value problems. Phys. Lett. A 350(1–2), 87–88 (2006).
Nadeem, M. & He, J. H. He-Laplace variational iteration method for solving the nonlinear equations arising in chemical kinetics and population dynamics. J. Math. Chem. 59(5), 1234–1245 (2021).
Ismail, F. et al. Fractional analysis of thin-film flow in the presence of thermal conductivity and variable viscosity. Waves Random Complex Media 1–19 (2022).
Ji, Q. P., Wang, J., Lu, L. X. & Ge, C. F. Li–He’s modified homotopy perturbation method coupled with the energy method for the dropping shock response of a tangent nonlinear packaging system. J. Low Freq. Noise Vib. Active Control 146134842091445 (2020).
Nadeem, M., He, J. H. & Islam, A. The homotopy perturbation method for fractional differential equations: Part 1 Mohand transform. Int. J. Numer. Methods Heat Fluid Flow 31(11), 3490–3504 (2021).
He, J. H. & Latifizadeh, H. A general numerical algorithm for nonlinear differential equations by the variational iteration method. Int. J. Numer. Methods Heat Fluid Flow 30(11), 4797–4810 (2020).
Johnston, S. J., Jafari, H., Moshokoa, S. P., Ariyan, V. M. & Baleanu, D. Laplace homotopy perturbation method for burgers equation with space- and time-fractional order. Open Phys. 14(1), 247–252 (2016).
Li, F. & Nadeem, M. He-Laplace method for nonlinear vibration in shallow water waves. J. Low Freq. Noise Vib. Active Control 38(3–4), 1305–1313 (2018).
Li, C., Qian, D. & Chen, Y. Q. On Riemann-Liouville and Caputo derivatives. Discret. Dyn. Nat. Soc. 1–15, 2011 (2011).
Ali, A., Bukhari, Z., Umar, M., Ismail, M. A. & Abbas, Z. Cu and cu-SWCNT nanoparticles’ suspension in pulsatile Casson fluid flow via Darcy-Forchheimer porous channel with compliant walls: A prospective model for blood flow in stenosed arteries. Int. J. Mol. Sci. 22(12), 6494 (2021).
Srivastava, N. The Casson fluid model for blood flow through an inclined tapered artery of an accelerated body in the presence of magnetic field. Int. J. Biomed. Eng. Technol. 15(3), 198 (2014).
Chaturani, P. & Palanisamy, V. Casson fluid model for pulsatile flow of blood under periodic body acceleration. Biorheology 27(5), 619–630 (1990).
Casson, N. Rheology of Dispersed System (Pergamon Press, 1959).
Khan, H., Qayyum, M., Khan, O. & Ali, M. Unsteady squeezing flow of Casson fluid with magnetohydrodynamic effect and passing through porous medium. Math. Probl. Eng. 2016, 1–14 (2016).
Wang, C.-Y. The squeezing of a fluid between two plates. J. Appl. Mech. 43(4), 579–583 (1976).
Khan, U., Ahmed, N., Khan, S. I., Bano, S. & Mohyud-Din, S. T. Unsteady squeezing flow of a Casson fluid between parallel plates. World J. Modell. Simul. 10(4), 308–319 (2014).
Qayyum, M., Ahmad, E., Riaz, M. B., Awrejcewicz, J. & Saeed, S. T. New soliton solutions of time fractional Korteweg-de Vries systems. Universe 8(9), 444 (2022).
Jamshed, W. & Aziz, A. Entropy analysis of TiO2-Cu/EG Casson hybrid nanofluid via Cattaneo-Christov heat flux model. Appl. Nanosci. 08, 01–14 (2018).
Jamshed, W. Numerical investigation of MHD impact on Maxwell nanofluid. Int. Commun. Heat Mass Transf. 120, 104973 (2021).
Jamshed, W. & Nisar, K. S. Computational single phase comparative study of Williamson nanofluid in parabolic trough solar collector via Keller box method. Int. J. Energy Res. 45(7), 10696–10718 (2021).
Jamshed, W., Devi, S. U. & Nisar, K. S. Single phase-based study of Ag-Cu/EO Williamson hybrid nanofluid flow over a stretching surface with shape factor. Phys. Scr. 96, 065202 (2021).
Jamshed, W., Nisar, K. S., Ibrahim, R. W., Shahzad, F. & Eid, M. R. Thermal expansion optimization in solar aircraft using tangent hyperbolic hybrid nanofluid: A solar thermal application. J. Mater. Res. Technol. 14, 985–1006 (2021).
Jamshed, W. et al. Computational frame work of Cattaneo-Christov heat flux effects on engine oil based Williamson hybrid nanofluids: A thermal case study. Case Stud. Therm. Eng. 26, 101179 (2021).
Jamshed, W. et al. Features of entropy optimization on viscous second grade nanofluid streamed with thermal radiation: A Tiwari and Das model. Case Stud. Therm. Eng. 27, 101291 (2021).
Jamshed, W. et al. Thermal growth in solar water pump using Prandtl-Eyring hybrid nanofluid: A solar energy application. Sci. Rep. 11, 18704 (2021).
Jamshed, W. et al. Implementing renewable solar energy in presence of Maxwell nanofluid in parabolic trough solar collector: A computational study Waves Random Complex Media https://doi.org/10.1080/17455030.2021.1989518 (2021).
Jamshed, W. Finite element method in thermal characterization and streamline flow analysis of electromagnetic silver-magnesium oxide nanofluid inside grooved enclosure. Int. Commun. Heat Mass Transf. 130, 105795 (2021).
Jamshed, W. et al. Thermal characterization of coolant Maxwell type nanofluid flowing in parabolic trough solar collector (PTSC) used inside solar powered ship application. Coatings 11(12), 1552 (2021).
Jamshed, W. et al. Dynamical irreversible processes analysis of Poiseuille magneto-hybrid nanofluid flow in microchannel: A novel case study. Waves Random Complex Media https://doi.org/10.1080/17455030.2021.1989518 (2022).
Hussain, S. M. et al. Effectiveness of nonuniform heat generation (sink) and thermal characterization of a Carreau fluid flowing across a nonlinear elongating cylinder: A numerical study. ACS Omega 7(29), 25309–25320 (2022).
Pasha, A. A. et al. Statistical analysis of viscous hybridized nanofluid flowing via Galerkin finite element technique. Int. Commun. Heat Mass Transf. 137, 106244 (2022).
Hussain, S. M., Jamshed, W., Pasha, A. A., Adil, M. & Akram, M. Galerkin finite element solution for electromagnetic radiative impact on viscid Williamson two-phase nanofluid flow via extendable surface. Int. Commun. Heat Mass Transf. 137, 106243 (2022).
Shahzad, F. et al. Thermal valuation and entropy inspection of second-grade nanoscale fluid flow over a stretching surface by applying Koo–Kleinstreuer–Li relation. Nanotechnol. Rev. 11, 2061–2077 (2022).
Jamshed, W. et al. Solar energy optimization in solar-HVAC using Sutterby hybrid nanofluid with Smoluchowski temperature conditions: A solar thermal application. Sci. Rep. 12, 11484 (2022).
Akgül, E. K. et al. Analysis of respiratory mechanics models with different kernels. Open Phys. 20, 609–615 (2022).
Jamshed, W. et al. Computational technique of thermal comparative examination of Cu and Au nanoparticles suspended in sodium alginate as Sutterby nanofluid via extending PTSC surface. J. Appl. Biomater. Funct. Mater. 1–20 (2022).
Dhange, M. et al. A mathematical model of blood flow in a stenosed artery with post-stenotic dilatation and a forced field. PLoS ONE 17, e0266727 (2022).
Akram, M. et al. Irregular heat source impact on Carreau nanofluid flowing via exponential expanding cylinder: A thermal case study. Case Stud. Therm. Eng. 36, 102190 (2022).
Shahzad, F. et al. Efficiency evaluation of solar water-pump using nanofluids in parabolic trough solar collector: 2nd order convergent approach. Waves Random Complex Media https://doi.org/10.1080/17455030.2022.2083265 (2022).
Author information
Authors and Affiliations
Contributions
Conceptualization: M.Q. Formal analysis: E.A. Investigation: S.A. and E.S.M.T.E.D. Methodology: W.J. Software: T.S. and E.A. Re-graphical representation and adding analysis of data: A.M. Writing—original draft: M.Q. and W.J. Writing—review editing: A.M. and T.S. Numerical process breakdown: A.I. Re-modelling design: W.J. and A.M. Re-validation: E.S.M.T.E.D. and A.I. Furthermore, all the authors equally contributed to the writing and proofreading of the paper. All authors reviewed the manuscript.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Qayyum, M., Ahmad, E., Afzal, S. et al. Fractional analysis of unsteady squeezing flow of Casson fluid via homotopy perturbation method. Sci Rep 12, 18406 (2022). https://doi.org/10.1038/s41598-022-23239-0
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-022-23239-0
This article is cited by
-
Gegenbauer Wavelet Collocation Method for the Fractional Unsteady Squeezing Flow of Casson Fluid
International Journal of Applied and Computational Mathematics (2025)
-
Critical analysis for nonlinear oscillations by least square HPM
Scientific Reports (2024)
