
Abstract
Identifying the direction of fault is an essential mission of the transmission line protective scheme. This paper discusses a direction protective technique based on a positive impedance approach. The samples of the instantaneous positive sequence voltage component and the instantaneous positive sequence current component are used to determine the impedance approach and complete the Z matrix values. The fault direction can be determine using Z matrix values. Different configurations of the power system are utilized to examine the proposed protective scheme. Software ATP-EMTP (Simulation experiments) verified the feasibility of the presented scheme. To verify the capability and accuracy of presented scheme, it is examined by many fault scenarios such as high fault resistance, far end fault, cross-country fault, power flow change, single pole tripping, CT saturation and noise impact. In addition, the validity of the presented scheme is compared with other protection directional schemes.
Similar content being viewed by others


Introduction
The continuity of the power supply is ensured by ensuring that the efficiency of the protection of the power system is at the level of the mark. As a result of the ever-increasing reliance on electrical energy, interruption power outages can significantly deteriorate social and financial stability. Thus, normal power system events need to be reliably ignored from the threat list, which should not be treated as a fault condition1. The direction protection scheme for TL is the most thought-provoking of the many schemes developed to protect various power system components. This appears from the fact that for a TL with a stretch of hundreds of kilometers, it is important to estimate the data available on both ends of the line2.
The protection of dual circuit lines is very complex due to the effect of mutual coupling, cross-country faults, far end faults evolving faults. High fault resistance (HFR), and cross-country faults3,4. This can be a very serious problem in important circuits as system stability is essential. Multi-location and developing effect on the behavior of the protection direction scheme5. In6, the basic features of distance and direction relays were discussed, as were the potential issues they may encounter in their designs and applications.
In7, a scheme for determining the direction of fault was proposed based on the superimposed voltage and superimposed current of the transmission line (TL). The basic features of direction relays were discussed, based on positive sequence current using discrete wavelet transform (DWT). In9, a scheme for determining the direction of fault was proposed based on general garden transformation (GPT). In10, and11, the schemes relied on the current signal only to detect the direction of the fault using the fault signal, also before the fault occurs no phasor estimate required. In12, a scheme for determining the direction of fault was proposed using magnitude change in voltage and current signals. In13, a scheme for determining the direction of fault was proposed based on fine state machine (FSM) positive sequence current. In14,15, the discussed protection technique is based on incorporating Discrete Fourier Transform (DFT) besides artificial neural network (ANN). The DFT is used to determine fundamental voltage and current magnitudes and then the output from DFT is fed to ANN to detect the fault direction. In16, the presented protection scheme is based on the combination of DFT and adaptive neuro-fuzzy inference system (ANFIS). This scheme depends only on current signals. However, the schemes13,14,15,16 depend upon huge samples and training for experience illustration, and also cannot treat the uncertainty considerations in TL.
In17,18, a scheme for determining the direction of fault was proposed based on superimposed current component. In19,20, a scheme for determining the direction of fault was proposed based on superimposed positive sequence component (SPSC) by contrasting and comparing the angle difference between the voltage and the current signals. In21, the discussed scheme relied on the active and reactive power measured at the relay point, also the relay performance was examined during single pole tripping (SPT) in22. This scheme is based on apparent powers. In23, a scheme for determining the direction of fault was proposed based on smallest square (LS) method to determine the required parameters. But this scheme affected by DC components, noise, and harmonics.
In24, a scheme for determining the direction of fault was proposed based on four classifiers (positive and negative sequence components of voltages and currents) and then combined these four classifiers using a fuzzy decision method to estimate the direction of the fault. In25, the protection direction scheme provided for the double-circuit TL circuit relied on four classifiers (positive and negative sequence components of voltages and currents). The four classifiers are used to estimate the fault direction. In26, the protective scheme provided for the double-circuit TL relied on incorporating a support vector machine (SVM) and discrete wavelet transform (DWT). In27, a scheme for double circuit was proposed to determine the direction of the fault using principal component analysis (PCA) of angles between negative and positive sequence components (PSC). In28, the protective scheme provided for the double-circuit TL relied on four classifiers (positive voltage sequence components and currents), and these four classifiers are an integrated fuzzy logic (FL) technique to get the fault direction. In29,30 the authors proposed the case of the single pole tripping (SPT) state.
In31, a technology based on the integration of both DFT and FL was introduced, since FL avoids connection link requirements. In32, a current-only technique was introduced using S-Transform to get the angle difference to determine the direction of the fault. In33, a scheme for determining the direction of fault was proposed based on angle difference between the post-fault current and the proposed reference signal. In34, a scheme for determining the direction of fault was proposed based on the correlation coefficient also using the traveling wave. In35, a negative sequence reactive power technique is presented to get the fault direction. In36, a superimposed impedance technique is presented based on instantaneous voltage and current samples to get the fault direction. In37, a scheme for determining the direction of fault was proposed based on negative sequence- current signals superimposed component, but this scheme affected by HFR as reported in38. In39 a scheme that relies on negative sequence superimposed impedance was presented as well as illustrating the impact of renewable energy inverter interface generators on directional relays. In40, a scheme that relies on fault and pre-fault current samples as well as knowledge of the direction of power flow was presented to get the fault direction. In41, a protection scheme was presented for both transmission and distribution systems based on superimposed positive sequence components of current. In31, a scheme based on DFT and a fuzzy logic system were introduced. The fuzzy logic system is utilized to escape connection link requirements. In42, a scheme for determining the direction of fault was proposed based on angle difference between the fault and the phase of the positive sequence current before the fault was introduced and applied to series-compensated transmission lines during SPT condition. In43, a principle was introduced for the construction of a directional element using transfer and consumption characteristics of high-frequency transient energy. This directional element only uses high-frequency transient fault in early-stage which can reliably discriminate the fault direction.
In44, the authors developed a directional detection scheme for unbalanced faults in such networks using superimposed symmetrical sequence quantities. The phase angle of the superimposed negative sequence admittance is used to determine fault direction. In45, an artificial neural network-based method for precise fault distance and direction estimate is given for the protection of transmission lines. The proposed method uses the voltage and current available at only the local end of line. In46, the line-mode fault component power based directional pilot protection is proposed for flexible DC distribution grid. the line-mode fault component power is built as the directional criterion. In47, the fault direction characteristics are constructed using the wavelet energy entropy difference of the fault currents of the two lines. The fault direction characteristics are combined with the start fault phase angle and transition resistance.
In48, the S-transform is employed to extract the time–frequency information of the fault transient voltage components, the direction identification criterion based on the energy difference between the reverse and forward transient voltage components is constructed. In49, the paper studies the characteristics of negative sequence power direction when the measuring points of the main line and branch lines of DG distribution network in forward fault or backward fault under the negative sequence current suppression strategy and puts forward a multi-terminal directional. In50, A directional relaying method is proposed for such connectivity using the phase angle difference between positive sequence voltage and the line current measured at the local bus relay.
In case of cross-country and evolving faults the direction of fault avoids maloperation of the relay as reported in51. Also, many techniques have a bad response due to mutual coupling in double-circuit TL. In this paper, a new protection technique based on instantaneous current and voltage samples is introduced to accurately estimate the fault direction to achieve the speedy and correct tripping, select the appropriate impedance element to locate faults, enable the single-pole operation and thus increase system stability. The proposed protection scheme (PPS) includes a standard for detecting fault direction and eliminating shortcomings and many issues related to previous protection schemes where its scheme works correctly in the case of SPT, inter-circuit fault, HFR, near internal fault, variation in operating voltage, variation in operating frequency, variation in source impedance, difference in source strength as well as power flow change. Table 1 reviews the transitional aspects of different protection techniques to get the direction of fault in TLs.
The rest of the paper is arranged as follows: A brief of the direction protection implementation challenges in TL are detailed in Sect. 1. The proposed protection scheme for TL is described in Sect. 2. Numerous simulation cases using the ATP program are implemented in Sect. 3 to validate the suggested method. A discussion of the generalization of the WSCC 9 bus system in Sect. 4. a comparison between PPS and other conventional techniques stated in the literature in Sect. 5. Finally, the conclusion is provided in Sect. 6.
Proposed protection scheme description
Fault analysis
The proposed directional protection detection algorithm is analyzed by representing a simple circuit consisting of two power lines and three buses as shown in Fig. 1.a, considering ZPM1 and ZMN1 are the positive sequence resistance of the PM and MN lines, respectively. The proposed relay located in bus M and the direction power flow from bus P to bus N. Determine the positive sequence components based on Eqs. (1) and (2).
The voltage PSC at the relay location can be determined as follows:
the PSC voltage at the relay is as follows, when the power flow changed from bus N to bus P
Equations (3), (4) provide PSC voltage before fault condition.
When a shunt fault on the forward side appears at a distance k from bus M, the positive sequence circuit is changes from Fig. 1a,b, and then, PSC voltage is as follows:

Equivalent circuit for positive sequence network.
By subtracting (1) from (5), the resultant superimposed PSC voltage is as follows:
where \(\:{I}_{1}^{{\prime\:}}\:\text{a}\text{n}\text{d}\:\:\:{V}_{1}^{{\prime\:}}\:\) are the superimposed PSC current and voltage at the fault, respectively.
If the shunt fault happens on the inverted side (between bus P and bus M) as shown in Fig. 1c, then, we have:
Subtracting (2) from (7):
Equations (8) and (6) can be utilized to estimate the path of the fault. This equation can be written in the following form (sampled data) as follows:
where k = 1, 2, …n shows the samples of signals and n shows the number of samples in a period. In case of 1.6 kHz as a sampling frequency, we get 64 samples in a period and Eq. (9) can be as follow:
Based on the previous analysis, the above matrix can be used to determine the fault direction. If a fault occurs in the forward side, the same matrix values will be positive, however the matrix values will be negative for the faults in the backward side.
Direction protection scheme
Figure 2 shows the proposed directional protection detection algorithm that is not utilized as a fault detector, however, the scheme for overcurrent is utilized for this function as per “IEC 60255”21. Several directional protection detection schemes based on voltage and current signals for the conventional TL22,23. Its schemes for directional relaying have limitations for changing the power flow, far-end fault, single pole tripping, cross-country fault, and inter-circuit fault leading to mal-operation. The proposed directional protection detection algorithm is based on the data samples (one cycle window) of PSC of voltage and current. Then these data are utilized to estimate the Z matrix. The fault direction is detected by utilizing the Z matrix values. The relation between the PSC of current, Z matrix, and PSC voltage are explained in Eq. (11).
Therefore, the proposed directional protection detection algorithm defines the voltage and current samples and then calculates the value of the Z matrix to obtain the relay decision. The action for the proposed directional protection detection algorithm at bus M is:
-
If the Z matrix value < K1 →► Reverse direction of the fault.
-
If the Z matrix value > K2 →► Forward direction of the fault.
In real life about that any scheme in general for protection, need a starting method to avoid false tripping due to very low values than can have noise, that is the reason manufacturers provide always threshold values. So we will use K1 and K2 for detect the fault direction.
Where, K1 is the reliable coefficient with a range of + (0.3–0.4) for reverse faults and K2 is the reliable coefficient with a range of − (0.3–0.4) for forward faults.
In the fault case during SPT condition, (VSPT1) is non-affected but (Ia=0) owing to the existence of SPT in phase-a. Then, (ISPT1) throughout SPT can be calculate as in Eq. (12). Consequently, the proposed scheme will get correct action.
If a three-phase shunt fault occurs, the three-phase voltage signals will be very low and can reach zero at a bolted fault at the relay point. Consequently, getting the Z matrix value is very difficult, to avoid this scenario an adaptive memory can be used.
Figure 3 declares the logic circuit of the PPS. A and B are the inverse matrix of the superimposed positive sequence component current and matrix of the superimposed positive sequence component voltage, respectively.
A = 0, 1 indicates the inverse matrix of the superimposed positive sequence component current is positive or negative value.
B = 0, 1 indicates the matrix of the superimposed positive sequence component voltage is positive or negative value.
Table 2 show the truth table of the proposed directional protection detection algorithm, and Eq. 13 describe the logic equation of the proposed directional protection detection algorithm. Consequently, the result = 0 denotes reverse fault and the result = 1 denotes forward fault.

Proposed directional protection detection algorithm.

Proposed directional protection detection algorithm logic circuit.
Computational requirement time
If the fault occurs, we notice that the relay seen it, and then the detection algorithm determines the initial wave front by processing this signal by converting it to phase mode to obtain positive sequence components. The value of the Z matrix across a moving window with a length of one cycle is determined. The proposed directional protection detection algorithm determines the fault direction in less than 0.02 s. In practice, a microprocessor-based relay with a performance of 1 GFLOPS performing signal processing and detection at the fault direction takes approximately 7 and 10 µs52.
Comparing the proposed directional protection detection algorithm with the ABB commercial directional protection relay (RXPDK 2 H and RAPDK)53. In ABB the setting range time is adjusted by the relay. The first one is definite time with a time delay from 0.05 to 8.1 s, and the second one is inverse time with a time delay from 0.05 to 1.1 s. Therefore, PPS takes a total operating time of about 0.0201 s. This small time verifies the fast performance.
PPS performance
Scenarios studied
Several simulations have been accomplished using ATP/EMTP for the evaluation of the proposed protection algorithm. Figures 4 shows the systems under study. Figure 4a shows the single circuit line29, and Fig. 4b shows the double circuit line30. The overhead line is modelled in non-transposed double-circuited type, where parameters are calculated in 50 Hz. It should be noted that in calculating machine dynamics, phenomena are mostly in power frequency, so power frequency based line parameters are to be applied. Phase line locations are “a”, “b” and “c” from the top in one side, and “c”, “b” and “a” in the other side for obtaining as better symmetry54. Proposed directional protection detection algorithm response was examined ten times. The main scenarios examined were created by varying parameters such as the fault location, fault inception time, fault resistance, far-end fault, close-in fault, cross-country fault for double circuit line, SPT, and PFC under dissimilar system situations. Only the main scenarios are clarified in the subsequent sections. The scenarios are consecutively detected the fault direction that can be classified as follows:
Scenario 1
Influence of different fault parameters (types, fault location, fault time, fault resistance, load angle) for single circuit line.
Scenario 2
HFR for single circuit line.
Scenario 3
SPT for single circuit line.
Scenario 4
PFC for single circuit line.
Scenario 5
Close in fault for single circuit line.
Scenario 6
Influence of different fault parameters (types, fault location, fault time, load angle, fault resistance) for double circuit line.
Scenario 7
HFR for double circuit line.
Scenario 8
SPT for double circuit line.
Scenario 9
PFC for double circuit line.
Scenario 10
Close-in fault for double circuit line.
Scenario 11
Far end fault for double circuit line.
Scenario 12
Cross-country fault for double circuit line.
Scenario 13
Influence of Noise on the PPS.
Scenario 14
Influence of sampling frequency on the PPS.
Scenario 15
Influence of alternative in operating voltage, frequency on the PPS.
Case 16
Influence of alternative in source impedance on the PPS.
Scenario 17
Influence of Source Strength on the PPS.
Scenario 18
Influence of different transmission line lengths on PPS.
Scenario 19
Influence of CT saturation on PPS.

Sample power system and ATP application photo.
Discussion and results
Influence of different fault parameters (types, fault location, fault time, fault resistance, load angle) for single circuit line: Scenario 1.
The proposed directional protection detection algorithm behavior in case of different fault parameters (types, fault location, fault time, fault resistance, load angle) for are presented in the subsection. The results of different fault parameters and fault conditions are confirmed in Table 3. It is spotted that the proposed directional protection detection algorithm decision has high precision as per Table 3 under different fault conditions.
HFR for single circuit line
HFR has impact in many protection techniques. an AG fault with a fault resistance of 100 Ω occurred at the time t = 0.18 s. on the front side. Figure 5 shows the dynamics performance of the proposed directional algorithm for the detection of the forward fault (Z matrix being negative). Then the AG fault occurred on the reverse side at the time t = 0.18 s, the dynamics performance of the proposed directional algorithm is shown in Fig. 5 b shows a positive Z matrix value. Figures 5c,d also show the dynamic performance of proposed directional algorithm in the case of a two-sided BCG fault occurring with a fault resistance of 200 Ω. Figure 5 shows that the proposed directional algorithm decision is precision under HFR at a single circuit line. In addition, a large number of scenarios for the healthy conditions of the transmission lines and external faults have been investigated and used in providing protection algorithms.

HFR results for single circuit line (scenario 2).
SPT for single circuit line: scenario 3
TL availability increasing and enhancement power transfer capacity by using SPT technique. As a result, protection schemes are sensitive to the SPT process. Consequently, an AG fault is assumed to occur in line 2 at the Fy position t1 = 0.1 S to create SPT case. After that, the SPT is executed by opening the faulted phase. Suppose a BG fault at t2 = 0.2 S on the forward side occurs, and the performance of PPS is shown in Fig. 6a In addition, if a BG fault on the reverse side t2 = 0.2 S occurred, and the behavior of the proposed scheme is shown in Fig 6b In addition, another test was done to ensure the availability of the proposed scheme. If the BC fault type in two sides occurs as shown in Fig. 6c,d. The results obtained, shown in Fig. 6 of the SPT cases, showed the availability of the proposed directional protection detection algorithm.

SPT results for single circuit line (scenario 3).
PFC for single circuit line: scenario 4
Angel of source A and angel of source B changed to examine the power flow change condition in the following equation:
Where ∆δ value (negative or positive) denoted that power flow change (reverse or forward). Note that if the PFC the rules of the proposed directional protection detection algorithm will be the same as in Sect. 3.
The ∆δ is changed to be negative. To address the proposed scheme behavior under this situation, BC fault (1Ω) at 0.18 s on two sides occurred. Figure 7a shows the performance of the proposed directional algorithm for forward faults. For BC fault reverse side (1Ω) at t = 0.18 s occurred, Fig. 7b shows the performance of the proposed directional algorithm for reverse fault (Z matrix is positive). It is noticed from Fig. 7 that the proposed directional protection detection algorithm decision is accurate under PFC at a single circuit line.

PFC results for single circuit line (scenario 4).
Close-in fault for single circuit line: scenario 5
ABCG close-in fault occurred with 100 Ω at 0.28 s in the forward side, the performance of the proposed directional algorithm for this case is shown in Fig. 8 (Z matrix is negative). Another fault done in reverse side and the proposed directional protection detection algorithm performance is shown in Fig. 8. It is remarked from Fig. 8 that the proposed directional protection detection algorithm decision is accurate under close-in faults at a single circuit line.

Close in fault results for single circuit line (scenario 5).
Influence of different fault parameters (types, fault location, fault time, load angle, fault resistance) for double circuit line: scenario 6
The proposed directional protection detection algorithm behavior in the case of different fault parameters (types, fault location, fault time, fault resistance, load angle) for double circuit lines are presented in the subsection. The different fault parameters results are demonstrated in Table 4. It is noticed that the proposed directional protection detection algorithm decision has high accuracy in Table 4 under different fault parameters and fault conditions.
HFR for double circuit line: scenario 7
The behavior of the proposed directional protection detection algorithm is examined for HFR such as CG fault occurring with 100 Ω and ABG fault occurring with 250 Ω fault resistance. CG fault at the forward side occurred, the behavior of the proposed directional algorithm (Z matrix is negative) is shown in Fig. 9a. Then the same fault occurred at reverse side. The behavior of the proposed directional algorithm (Z matrix is positive) is shown in Fig. 9b. Then, ABG fault occurred at the forward and revers sides with 250 Ω fault resistance. Figures 9c,d show the performance of the proposed directional protection detection algorithm in scenario of ABG fault occurring on two sides with 250 Ω fault resistance. It is remarked from Fig. 9 that the proposed directional protection detection algorithm decision is accurate under HFR at the double circuit line.

HFR results for double circuit line (scenario 7).
SPT for double circuit line: scenario 8
The behavior of the proposed directional protection detection algorithm is examined for SPT for double circuit line such as AG fault occurs in line 2 (position Fy, t1 = 0.1 S) then opening the phase faulted, and create CG fault (t2 = 0.18 S) on the forward side. The behavior of the proposed directional algorithm is shown in Fig. 10.a. Then the same fault scenario occurred at reverse side. The behavior of the proposed directional algorithm is shown in Fig. 10b. Another scenario was done a BC fault type occurred at the forward and revers sides as shown in Fig. 10c & d. It is remarked from Fig. 10 that the proposed directional protection detection algorithm decision is accurate under SPT at the double circuit line.

SPT results for double circuit line (scenario 8).
PFC for double circuit line: scenario 9
To examine the PFC situation in case of double circuit line is the same for single circuit line by using Eq. (14). ∆δ is changed to be -ve. To explain the behavior of the proposed directional protection detection algorithm, CG fault happened (0.2 S in different sides with 0.5 Ω) in different sides. Figures 11a,b show the performance of the proposed directional protection detection algorithm in scenario of PFC.

PFC results for double circuit line (scenario 9).
Close in fault for double circuit line: scenario 10
The proposed directional protection detection algorithm is examined for 3-φ close-in fault occurred at 0.2 s in two sides with 1 Ω, the proposed directional protection detection algorithm behavior for faults at both sides is shown in Fig. 12. It is remarked from Fig. 12 that the proposed directional protection detection algorithm decision is precise under close in faults in double circuit line.

Close in fault results for double circuit line (scenario 10).
Far end fault for double circuit line: scenario 11
The proposed directional protection detection algorithm is examined for far end faults close to the remote bus N. Usually the conventional protection schemes based on travelling wave (TW) are unable to detect the far end fault. Dynamic behavior of the proposed directional protection detection algorithm at this scenario is evaluated with different fault types. If SLG (CG) fault happened at 0.2 S, the PPS behavior is shown in Fig. 13a declare the Z matrix value of the proposed directional protection detection algorithm is -ve. If ABCG fault happened at time t = 0.2 S, the proposed directional protection detection algorithm behavior is shown in Fig. 13b declare the Z matrix value is -ve. It is spotted from Fig. 13 that the proposed directional protection detection algorithm decision is precise under far end faults.

Far end faults results for double circuit line (scenario 11).
Cross country fault for double circuit line: scenario 12
Cross-country fault occurs when SLG faults happens in different lines of the same circuit in two different positions. The proposed directional protection detection algorithm is tested for this case with different fault position and location. Table 5 declare the scenario results of proposed directional protection detection algorithm. Also Fig. 14 show cross-country faults in time domain. It is noticed from the Table 5; Fig. 14 that the proposed directional protection detection algorithm decision is accurate under cross-country faults.

Cross-country faults result for double circuit line (scenario 12).
Influence of noise on the PPS: scenario 13
The behavior of the proposed directional protection detection algorithm has been tested during noisy conditions. A signal-to-noise ratio (SNR) of 60–30 dB has been studied. The AG fault in single circuit line with 10 Ω at forward side was tested to achieve the noise case. Phase A current signals without and with noise is shown in Fig. 15 shows the performance of the proposed directional protection detection algorithm for this situation. Consequently, the proposed directional protection detection algorithm is not affected by the existence of noise.

Behavior of PPS under incorporated the noise (scenario 13).
Influence of sampling frequency on the PPS: scenario 14
To examine the impact of sampling frequency, the proposed directional protection detection algorithm under CG fault occurred at forward side in single circuit line by changing the current sampling frequency. A CG fault has occurred at forward side is generated. Figure 16 demonstrate the proposed directional protection detection algorithm behavior under dissimilar sampling frequencies.
Influence of variation in operating voltage, frequency on the PPS: scenario 15
The proposed directional protection detection algorithm is tested for single circuit line under changing the operating frequency and voltage. In this scenario, +/-10% margin is utilized for voltage dissimilarity and +/-0.5% margin is utilized for the frequency difference. In this case, Table 6 shows the scenario results that declare and confirms the robustness and effectiveness of the proposed directional protection detection algorithm, respectively.

PPS performance under different sampling frequency (scenario 14).
Influence of dissimilarity in source impedance on the PPS: scenario 16
Proposed directional protection detection algorithm is examined for single circuit line as consider dissimilarity of the source impedance. In this scenario, +/-10% margin is utilized for variation of source impedance. In this scenario, Table 7 show the results that declare and confirms effectiveness of the proposed directional protection detection algorithm.
Influence of source strength on the PPS: scenario 17
If the short-circuit is not adequate to initiate protective relays. The behavior of the proposed directional protection detection algorithm is analyzed in such conditions (weak in-feed). In this scenario, Table 8 shows the results that confirms the robustness and effectiveness of the proposed directional protection detection algorithm.
Influence of different transmission line length on PPS: scenario 18
The proposed directional protection detection algorithm performance has been investigated for different line length in case of double circuit system. Firstly, the line length was 140 km. Moreover, the proposed directional protection detection algorithm examined under dissimilar line length as shown in Table 9. Thus, the proposed directional protection detection algorithm has not affected by this scenario.
Influence of CT saturation on PPS: scenario 19
The performance of proposed scheme for the case of current transformer (CT) errors is evaluated here. The heavy fault current in transmission line with decaying DC offset causes CTs saturation which are connected between both the ends of the protective zone. The secondary currents of saturated CTs are reduced to very low value as compare to actual value. The situation makes maloperation in most of the relaying algorithms. To evaluate the performance of the proposed algorithm for CT saturation, a three-phase fault in a single circuit is simulated beyond bus-L (forward). At bus R the CT is designed with magnetization characteristic as in55. As well as testing the impact of CT saturation, the secondary resistive burden of CTs is increased from 0.5 to 2.5 Ω. The measured fault current signal at CT having nonlinear characteristics. The computed line resistance is plotted in Fig. 17 using (11) and the negative value depicts during forward fault the decision of the proposed algorithm on direction computation is correct and not affected by CT saturation.

CT saturation result for single circuit line (ABCG fault).
Generality of PPS
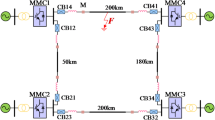
The proposed directional protection detection algorithm is comprehensive for any transmission systems. Consequently, proposed directional protection detection algorithm is utilized in a WSCC 3-machine power system, a 9-bus configuration shown in Fig. 18. Also, to assess the proposed protection scheme in a more realistic power system, this generalization was done. WSCC 9 bus system parameters are given in38. The proposed directional protection detection algorithm is mounted between buses 7 and 8 as shown in Fig. 18. Table 10 shows the results that confirm the robustness and effectiveness of the proposed directional protection detection algorithm. Also the proposed protection scheme can be extended for any transmission system As a part of generalization, a simulation study is conducted using a 500 kV, 50 Hz transmission system model equipped with shunt reactors, as depicted in Fig. 19. The simulation work is conducted using ATP/EMTP software. The line parameters are provided in56.

WSCC 9 bus system.
The proposed directional protection detection algorithm behavior in case of different fault parameters (types, fault location, fault time, fault resistance, load angle) are presented for transmission system model equipped with shunt reactors. The results of different fault parameters and fault conditions are confirmed in Table 11. It is spotted that the proposed directional protection detection algorithm decision has high precision as per Table 11 under different fault conditions.

Single line diagram for transmission system model equipped with shunt reactors.
Dependability and security of PPS
Moreover, the reliability and sensitivity of the proposed scheme with healthy disturbance was also tested by varying source impedances, varying operating voltage, varying operating frequency, noise effect, different sampling frequency and different transmission line lengths. In addition, the response of the proposed scheme based on dependability and security were discussed and the results obtained showed that the proposed scheme has a good performance.
The proposed scheme is appraised using two significant characteristics: dependability and security. Basically, it is necessary that the proposed scheme provides the protective relay including the capability to achieve both dependability and security without compromising either. In this case some false tripping may happen, which can lead in the worst case to catastrophic impact on power system. In fact, the dependability indicates to a certainty grade that proposed scheme will run correctly, and this term is mainly dependent on the relay sensitivity. To demonstrate the performance of the proposed scheme, the reliability, dependability and security of the proposed scheme are measured as
Considering all studied cases based on fault parameter variations,
It was found that the relay operated 200 times, out of which 196 were correct trips. If the relay failed to issue trip decision on 2 situations; therefore, the measured dependability of the proposed scheme is 98.9%. Meanwhile, the term of security is key feature in a protective relay in which it measures the certainty grade that the relay will not run incorrectly. Furthermore, the security term is mainly dependent on the relay selectivity. To clarify the performance of proposed scheme based on the security term, the security formula is expressed by (17) therefore, the measured security of the proposed scheme is 98%. Finally, the measured reliability of the proposed scheme is 97%. Numerous healthy and unhealthy disturbances have been examined to prove the efficacy of the proposed scheme for different fault parameters. The results showed the ability of the proposed scheme to identify the fault direction.
Behavior evaluation of distinctive schemes
Performance evaluation study between the proposed directional protection detection algorithm and other schemes in the literature is presented in Table 12. The proposed directional protection detection algorithm does not need any compensation schemes in case of PFC. Ref37. utilized the phase angle differentiation between currents but it affected by HFR. This scheme examined similar situations to the same scenario in this paper, a CG fault type occurred that has a fault resistance of 210 Ω on the forward side for single circuit line. The Z matrix value of the PPS was estimated, and it was given the negative value for a forward side fault, as in Fig. 20.a. The angle difference was given the positive with the presence of fault resistance, as shown in Fig. 20.b. The PPS delivers a correct decision during HFR while the scheme in Ref37. is fails during same HFR.
Commercial protective relay ABB 670 series in57. is compared with PPS. By comparing the main key for both ABB 670 protective relay and PPS, ABB 670 is depended on DFT and PPS is depended on Z matrix value. DFT is assumes the fault signal is a stationary signal, lead to eliminate the time-frequency information which consider the major drawback in using its algorithm. Practically, the signals comprise numerous non-stationary signals. In58, the Fourier analysis is not suitable for detecting the transitory characteristics.
The innovation of the proposed directional protection detection algorithm and the greatest significant characteristics are informed in the following points:
-
Proposed directional protection detection algorithm relies on the single end measurement (no need for communication schemes) that decreases the cost.
-
Travelling wave-based DR is negligible compared to sampling frequency for PPS. • The robustness of the improved directional protection scheme depends on the Z matrix value to avoid false action during noise effects, different transmission lines, SC and SPT.
-
Proposed directional protection detection algorithm can be utilized small sampling frequency that is smaller than the sampling frequency required to apply the travelling wave.
-
The Proposed directional protection detection algorithm doesn’t required knowledge of the fault ignition time.
-
The Proposed directional protection detection algorithm is characterized by very fast response and precise measurements.
-
Additional artificial intelligence techniques are not needed for support in the PPS, resulting in a simplified scheme compared with the competitive schemes in the literature.
-
Improved directional protection scheme depends on positive sequence impedance component and avoids false action during PFC.

Behavior for a CG fault (210 Ω).
Conclusion
Protection of TL systems present several challenges due to the unique characteristics. Fault direction scheme is greatest significant schemes used to protective them. The traditional schemes for determine the fault direction have issues in particular circumstances such as HFR, SPT and PFC. In this article, a novel directional protective scheme is proposed for single and double TL. A new directional protection detection algorithm is proposed based on the calculated nominal value of the voltage and current signals that utilized to get the Z matrix value. Through extensive testing on a simulated TL, the proposed protection technique exhibited reliable performance across various fault scenarios, including fault types, locations, high impedances, cross-country fault, inter-circuit fault, far-end fault, CT saturation, SPT, PFC, noise effect, variation in operating voltage, variation in source strength and different sampling frequency. The results indicate that the proposed approach competently classifies the direction of fault. Assessment with other published schemes declare the precision and suitability of the proposed directional protection detection algorithm.
Finally, we should point out that other factors that were beyond the framework of the study, and will be included in future studies, are considering renewable energy sources, the power quality issues, cables, combination between combination and transmission lines and studying the behavior of the proposed scheme in case of power swing condition.
Data availability
The authors confirm that the data supporting the findings of this study are available within the article Data Availability Statement: All data generated or analysed during this study are included in this published article.
Abbreviations
- \({I}_{1}{\prime}\) :
-
Superimposed positive sequence current component
- \({V}_{1}{\prime}\) :
-
Superimposed positive sequence voltage component
- \({\text{E}}_{\text{A}}\) :
-
The A’s equivalent positive-sequence voltage
- \({\text{E}}_{\text{B}}\) :
-
The B’s equivalent positive-sequence voltage
- \({\text{I}}_{1\text{ f}}\) :
-
Positive sequence current component at the relay location with fault
- \({\text{I}}_{1\text{ pre}}\) :
-
Positive sequence current component at the relay location without fault
- \({\text{V}}_{1}^{\text{f}}\) :
-
Positive sequence voltage component at the relay location with fault
- \({\text{V}}_{1}^{\text{pre}}\) :
-
Positive sequence voltage component at the relay location without fault
- I :
-
Phase A current
- I b :
-
Phase B current
- I c :
-
Phase C current
- Ind1 :
-
Phase angel of positive sequence components
- Ind2:
-
Phase angel of superimposed positive sequence currents components
- Ind3:
-
Phase angel of superimposed positive sequence current and voltage components
- Ind4:
-
Phase angel of superimposed negative sequence current and voltage components
- ISPT1 :
-
Positive sequence current component during single pole tripping
- S f :
-
Sampling frequency
- V a :
-
Phase A voltage
- V b :
-
Phase B voltage
- V c :
-
Phase C voltage
- VSPT1 :
-
Positive sequence voltage component during single pole tripping
- ZPM1 :
-
Positive sequence impedance of line AB
- ZMN1:
-
Positive sequence impedance of line BC
- ANFIS:
-
Adaptive neuro-fuzzy inference system
- ANN:
-
Artificial neural network
- CM:
-
Commutative method
- CT:
-
Current transformer
- DFT:
-
Discrete fourier transform
- DWT:
-
Discrete wavelet transform
- F:
-
Forward direction
- FL:
-
Fuzzy logic
- FSM:
-
Finite state machine
- GPT:
-
General park transformation
- HFR:
-
High fault resistance
- LST:
-
Least square technique
- n:
-
Number of sample
- N.R:
-
Not reported
- NSC:
-
Negative sequence component
- NSSC:
-
Negative-sequence-superimposed component
- PCA:
-
Principal component analysis
- PFC:
-
Power flow change
- PFD:
-
Power flow direction
- PPS:
-
Proposed protection scheme
- PSC:
-
Positive sequence component
- R:
-
Reversed direction
- SPSC:
-
Superimposed positive sequence component
- SPT:
-
Single pole tripping
- SVM:
-
Support vector machine
- TL:
-
Transmission line
- TW:
-
Travelling wave
- VT:
-
Voting technique
- − :
-
Subtract
- &:
-
Ampersand
- *:
-
Multiplication sign
- []:
-
Brackets
- + :
-
Addition
- = :
-
Equality
- > , < :
-
Is less than, is large than
- J:
-
Complex number
- \({e}^{x}\) :
-
Exponential function
-
 :
: -
Not gate
-
 :
: -
And gate
-
 :
: -
Or gate
 :
: :
: :
:References
Horowitz, S. H. & Phadke, A. G. Power System Relaying 2nd edn (Wiley, 1995).
Kundur, P. Power System Stability and Control (McGraw-Hill, 1994).
Agrasar, M., Uriondo, F., Hernandez, J. R. & Alvarez, R. A useful methodology for analyzing distance relays performance during simple and inter-circuit faults in multi-circuit lines. IEEE Trans. Power Delivery. 12 (4), 1465–1471 (1997).
Spoor, D. J. & Zhu, J. Inter-circuit faults and distance relaying of Dual-Circuit lines. IEEE Trans. Power Delivery. 20 (3), 1846–1852 (2005).
Swetapadma, A. & Yadav, A. Improved fault location algorithm for Multi-Location faults, transforming faults and shunt faults in TCSC compensated transmission line, IET generation. Transmission Distribution. 9 (13), 1597–1607 (2015).
Andrichak, J. G. & Alexander, G. E. Distance Relays Fundamentals, GE Power Management, GER-3966, 1–15.
Benmouyal, G. & Mahseredjian, J. Directional and faulted phase selector element based on incremental quantities. IEEE Trans. Power Delivery. 16 (4), 478–484 (2001).
Ngaopitakkul, A. & Kaitwanidvilai, S. IPEC, A new directional relay algorithm for the protection of transmission network systems using discrete wavelet transforms, 980–983. (2010).
Zhang, C., Tan, J. & Gu, B. A novel negative sequence reactance based high speed directional relay algorithm. Int. Trans. Electr. Energy Syst. 25 (10), 2443–2454 (2015).
Nojavan, M., Seyedi, H. & Mehdinejad, M. A novel scheme for current-only directional overcurrent relay. Electr. Power Energy Syst. 82, 252–263 (2016).
Jalilian, A., Hagh, M. T. & Hashemi, S. M. An innovative directional relaying scheme based on postfault current. IEEE Trans. Power Delivery. 29 (6), 2640–2647 (2014).
Jena, P., Pradhan, A. K. & Positive-Sequence, A. Directional relaying algorithm for Series-Compensated line. IEEE Trans. Power Delivery. 25 (4), 2288–2298 (2010).
Swetapadma, A. & Yadav, A. An innovative finite state automata based approach for fault direction Estimation in transmission lines. Measurement 99, 13–22 (2017).
Yadav, A., Dash, Y. & Ashok, V. ANN based directional relaying scheme for protection of Korba-Bhilai transmission line of Chhattisgarh state. Prot. Control Mod. Power Syst. 1, 15 (2016).
Yadav, A. & Thoke, A. S. Transmission line fault distance and direction Estimation using artificial neural network. Int. J. Eng. Sci. Technol. 3 (8), 110–121 (2011).
Swetapadma, A. & Yadav, A. High-Speed directional relaying using adaptive Neuro-Fuzzy inference system and fundamental component of currents. IEEJ Trans. Electr. Electron. Eng. 10, 653–663 (2015).
Eissa, M. M. Current directional protection technique based on polarizing current. Electr. Power Energy Syst. 44, 488–494 (2013).
Ashtiani, H. J., Samet, H. & Ghanbari, T. Simple current-based algorithm for directional relays. IET Generation Trans. Distribution. 11 (17), 4227–4237 (2017).
Gao, H. & Crossley, P. A. Design and evaluation of a directional algorithm for transmission-line protection based on positive sequence fault components. IET Generation Transmission Distribution. 153 (6), 711–718 (2006).
Gao, H. & Crossley, P. A. Directional relay for EHV transmission lines using positive sequence fault components, IEEE Russia Power Tech, St. Petersburg, Russia (2005).
Eissa, M. M., Hasan, S. & Saleh, S. S. A new digital filter directional relay technique using active/reactive power portrait. Electr. Power Energy Syst. 86, 33–52 (2017).
Kumar, J. & Jena, P. Directional relaying in presence of STATCOM during single pole tripping. IET Sci. Meas. Technol. 11 (5), 673–680 (2017).
Suryanarayanaa, G., Raob, G. K., Sarangib, S. & Rajaa, P. Directional relaying using parameter Estimation approach. Electr. Power Energy Syst. 107, 597–604 (2019).
Jena, P. & Pradhan, A. K. An integrated approach for directional relaying of the Double-Circuit line. IEEE Trans. Power Delivery. 26 (3), 1783–1792 (2011).
Biswal, M., Pati, B. B. & Pradhan, A. K. Directional relaying for double circuit line with series compensation. IET Generation Transmission Distribution. 7 (4), 405–413 (2013).
Swetapadma, A. & Yadav, A. Directional relaying using support vector machine for double circuit transmission lines including cross-country and inter-circuit faults. Electr. Power Energy Syst. 81, 254–264 (2016).
Kumar, J., Khaddar, N. & Jena, P. Protection of Double-Circuit line with thyristor controlled series capacitor using principal component analysis. Electr. Power Compon. Syst. 45 (1), 63–74 (2017).
Jena, P. & Pradhan, A. K. Solution to directional relaying for double circuit line, International Conference on Energy, Automation and Signal, 1–6, Bhubaneswar, Odisha, India. (2011).
Adly, A. R., El Sehiemy, R. A. & Abdelaziz, A. Y. A directional protection scheme during single pole tripping. Electr. Power Syst. Res. 144, 197–207 (2017).
Adly, A. R., El, R. A., Sehiemy & Abdelaziz, A. Y. A negative sequence superimposed pilot protection technique during single pole tripping. Electr. Power Syst. Res. 137, 175–189 (2016).
Mishra, P. K. & Yadav, A. A single ended fuzzy based directional relaying scheme for transmission line compensated by fixed series capacitor. Intell. Syst. Des. Appl. 941, 749–759 (2020).
Hosseini, H. S., Koochaki, A. & Hosseinian, S. H. A novel scheme for current only directional overcurrent protection based on Post–Fault current phasor Estimation. J. Electr. Eng. Technol., 1–11. (2019).
Kiaei, I., Lotfifard, S. & Ghanaatian, M. Current-only directional overcurrent protection using postfault current, IEEE Texas Power and Energy Conference, 7–8 TX, USA. (2019).
Lei, A., Dong, X. & Terzija, V. An Ultra-High-Speed directional relay based on correlation of incremental quantities. IEEE Trans. Power Delivery. 33 (6), 2726–2735 (2018).
Usta, O., Ozveren, F., Kara, B., Gocer, C. & Ozgur, H. M. A new directional relaying scheme for the protection of active distribution networks against asymmetric faults, IEEE PES Innovative Smart Grid Technologies Conference Europe, 21–25 (Sarajevo, Bosnia-Herzegovina, 2018).
Tahsini, V., Ojaghi, M., Mazlumi, K. & Mohammadi, S. A Novel Directional Relaying Scheme Using Superimposed Impedance Approach, Protection & Automation in Power System Conference (Sharif University of Technology, 2019).
Jena, P. & Pradhan, A. K. Directional relaying during single-pole tripping using phase change in negative-sequence current. IEEE Trans. Power Del. 28 (3), 1548–1557 (2013).
Jena, P. & Pradhan, A. K. Directional relaying during secondary Arc using negative sequence superimposed technique. IEEE Trans. Power Del. 30 (3), 1626–1628 (2015).
Jia, K. et al. Influence of Inverter-Interfaced renewable energy generators on directional relay and an improved scheme. IEEE Trans. Power Electron. 34 (12), 11843–11855 (2019).
Samet, H., Ghanbari, T., Jarrahi, M. A. & Ashtiani, H. J. Efficient Current-Based directional relay algorithm. IEEE Syst. J. 13 (2), 1262–1272 (2019).
Adly, A. R. et al. Enhancing the performance of directional relaying using a positive sequence superimposed component. Electr. Eng. https://doi.org/10.1007/s00202-019-00896-5 (2020).
Akter, S., Das, P. N., Saha Roy, B. K. & Abdelaziz, A. Y. Positive-sequence component based directional relaying algorithm for single-pole tripping. Arab. J. Sci. Eng., pp. 1–15. (2019).
Tao, R. et al. A direction element using high frequency transient energy in distribution network with distributed generation. J. Eng. 16, 1497–1501 (2019).
Opokualeks, K., Dimitrovski, A. & Ferrari, M. Performance evaluation of a novel Sequence-Based directional detection strategy for protection of active distribution networks. IEEE Access., 13, (2025).
Abiodun Hussein, S., Titilayo, A. & Kuku A Review of Transmission line fault distance and direction estimation using various techniques 2024 International Conference on Science, Engineering and Business for Driving Sustainable Development Goals (SEB4SDG), Omu-Aran, Nigeria, 02–04 (2024).
Wei, X., Zou, G., Novel Directional Pilot Protection for Flexible DC Distribution Grid & Engineering, E. A 9th Asia Conference on Power and (ACPEE), Shanghai, China 11–13 (2024).
Guo, Z., Li, H. & Wang, H. Line direction protection based on wavelet energy entropy difference and SVM. J. Electr. Eng. Technol. 20, 2137–2148 (2025).
Guo, Z., Deng, Y., Zhang, T. & Huang, Z. A novel directional pilot protection method for EHV transmission lines based on S–transform and SVM. Discover Appl. Sci., (2025).
Zhang, J. et al. Multi-terminal negative sequence directional pilot protection method for distributed photovoltaic and energy storage distribution network. Int. J. Electr. Power Energy Syst., 157, (2024).
Chowdhury, A., Nayak, K. & Pradhan, A. K. Positive sequence component based directional relaying for lines integrated with solar photovoltaic plant. Electr. Power Syst. Res., 237, (2024).
Ashok, V., Yadav, A. & Abdelaziz, A. Y. MODWT-based fault detection and classification scheme for cross-country and evolving faults. Electr. Power Syst. Res. 175, 1–20 (2019).
Perez, F. E., Aguilar, R., Orduna, E., Jager, J. & Guidi, G. High-speed non-unit Transmission Line Protection Using single-phase Measurements and an Adaptive Wavelet: Zone Detection and Fault Classification6. 593–604 (IET Generation, Transmission & Distribution, 2012). 7.
ABB (RXPDK 2H. and RAPDK) directional time-overcurrent relays and protection assemblies based on single phase elements, (1999).
Haginomori, E. Applied ATP-EMTP To highly-sophisticated electric power systems (2003).
Gajbhiye, R. K., Gopi, B., Kulkarni, P. & Soman, S. A. Computationally efficient methodology for analysis of faulted power systems with series-compensated transmission lines: a phase coordinate approach. IEEE Trans. Power Del. 23 (2), 873–880 (2008).
Huang, S. F. & Wang, X. G. A Fault location scheme based on spectrum characteristic of fault generated high frequency transient signals, In: Proc. IEEE Power & Energy Society General Meeting 1–5, (2009).
ABB RELION 670 SERIES. Line distance protection REL670, Version 2.1 ANSI, Application manual, (2016).
Program, M. A. T. L. A. B. Wavelet Toolbox User Guide Version 3.0.1.
Funding
Open access funding provided by The Science, Technology & Innovation Funding Authority (STDF) in cooperation with The Egyptian Knowledge Bank (EKB).
Author information
Authors and Affiliations
Contributions
Ahmed R. Adly(1), Mahmoud A. Elsadd(2), Mahmoud M. Elgamasy(3), Omar F. Fadl(4), and Mohamed A. Tolba(5)Ahmed R. Adly (1): Conceptualization, Methodology, Software, Data curation, Writing-Original draft preparation, Visualization, Investigation, Supervision, Validation, Writing-Reviewing and Editing, Mahmoud A. Elsadd (2): Conceptualization, Data curation, Methodology, Visualization, Writing -review & editing, Mahmoud M. Elgamasy (3): Methodology, Validation, Software, Writing -review & editing, Omar F. Fadl (4): Supervision, Validation, Writing-Reviewing and Editing, Mohamed A. Tolba (5): Data curation, Writing-Original draft preparation, Visualization, Investigation.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Adly, A.R., Elsadd, M.A., Elgamasy, M.M. et al. Directional protection scheme using impedance approach for transmission lines. Sci Rep 15, 20217 (2025). https://doi.org/10.1038/s41598-025-06609-2
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-06609-2
