
Abstract
The force-to-rebalance (FTR) mode is one of the most widely employed measurement schemes in MEMS Coriolis vibratory gyroscopes due to its high precision and stability. However, phase errors distributed across multiple control loops fundamentally constrain the achievable accuracy and robustness of rate measurement. This paper systematically categorizes the phase errors in both the drive modal and sense modal control loops, distinguishing between those arising in the forward and feedback paths, while excluding feedthrough effects. The influence of these phase errors is comprehensively analyzed across three key control loops: the drive modal control loop, the FTR rate control loop, and the quadrature stiffness correction loop. To address phase errors in the drive modal control loop, a dedicated calibration procedure is proposed for both the feedback and forward paths. The effects of phase errors on amplitude regulation, frequency tracking, and FTR rate measurement are quantitatively examined. For the sense modal control loop, an FTR control architecture incorporating phase error characteristics is established, along with a corresponding calibration procedure. Furthermore, the impact of phase errors on the effectiveness of quadrature stiffness correction and FTR rate measurement is investigated in detail. Finally, a comparative analysis of the sensitivity of system performance to various phase errors is conducted, and the relative influence weights of different error sources are determined. The results provide diagnostic insight into the principal mechanisms by which phase errors affect FTR gyroscope performance and lay a foundation for targeted real-time compensation design.

Similar content being viewed by others


Introduction
MEMS gyroscopes, which offer the advantage of low CSWaP (Cost, Size, Weight, and Power) values1,2,3, have been widely adopted across various industrial applications that require rotation angle and angular velocity measurements, such as drones3, smart home devices4, autonomous vehicles5 and their navigation systems2. As the application scope expands, the performance requirements for MEMS gyroscopes are becoming increasingly stringent. The measurement modes of MEMS gyroscopes are divided into three categories: rate mode6, rate integrating mode7, and frequency-modulated mode8. Among these, rate mode features a simple control method and excellent static performance, making it the preferred measurement mode for applications. Furthermore, the rate mode is classified into two categories: open-loop measurement method and FTR measurement method9. The FTR measurement method is the most prevalent among these modes5,6,9,10,11,12,13.
The MEMS rate gyroscope inevitably encounters phase errors within the system, leading to deviations in the signal pickoff and excitation of the resonator, which consequently affect the rate mode’s performance13,14,15. TheMEMS rate gyroscope has two operational modes: drive mode (X mode) and sense mode (Y mode). Phase errors occur in the excitation circuits11,12,13, signal pickoff circuits10,11,13,14,16, and signal processing with calculation circuits11,13 of both modes. Additionally, the frequency split between the two modes and the sense modal quality factor can also introduce demodulation phase errors16,17,18.
Researchers have proposed several methods to compensate for phase errors and mitigate their impact on gyroscope performance. Liu et al. proposed a pickoff circuit with low phase shift to reduce the drift of zero rate output (ZRO)19. As discussed in the works of Jia et al.17, Zhao et al.18, and Ezekwe et al.20, the phase of the demodulated reference signals in sense mode has been adjusted to improve the ZRO performance of the open-loop measurement mode without closed-loop phase compensation. Much literature has proposed calibration and compensation methods for the phase error in drive mode10,11,13,21,22, especially the online compensation method proposed by Wu et al.11 and Zhou et al.13 The phase error was obtained by analyzing the coupling relationship between the quadrature channel and the rate output signal in the sense-mode control loop, and was subsequently compensated in the forward path of the drive-mode control loop10. To determine the phase error in the drive modal control loop, the dual-sideband excitation method was employed, and the influence of phase error on the FTR method was analyzed11. The phase error is determined by minimizing the amplitude of the drive-mode excitation signal, and the obtained result is subsequently used to adjust the phases of both the forward and feedback paths in the sense-mode control loop, while also calibrating the phase of the forward path in the sense-mode control loop13. As indicated by Kuang et al.12, Pagani et al.16, and Zhou et al.23, phase errors in the sense mode control loop can be compensated. Kuang et al.12 employed a sideband excitation signal to obtain the phase error in the sense modal control loop, thereby facilitating an adjustment to the phase of the FTR excitation signal. Pagani et al.16 utilized the phase difference between the drive modal excitation signal and the sense modal pickoff signal to extract the phase error, which is used to adjust the phase of the demodulation reference signal to achieve compensation in the open-loop measurement method. Zhou et al.23 used the quadrature stiffness and damping coupling signals to identify phase errors using a recursive least squares algorithm, thereby enabling in-run compensation.
However, most of the literature does not examine the impact of phase errors at varying positions within the two operational modes on the efficacy of their control loops, nor on the static and dynamic performance. Furthermore, most phase error calibration or compensation methods only address phase errors in the forward channel or the feedback channel of the modal control loop, and do not individually calibrate or compensate for phase errors at different positions. This paper investigates the causes and locations of phase errors in the two modal control loops, and the effects of phase errors at different locations on both operational modes are analyzed. An FTR control loop model that incorporates phase errors in both the feedback and forward channels is proposed to perform time and frequency domain analyzes and investigate the effects of phase errors on bias, scale factor, and bandwidth. To achieve mechanism-level attribution and the identification of dominant phase-error sources, calibration schemes for phase errors in both the forward and feedback paths of the drive and sense modal control loops are designed. On this basis, a progressive comparative analysis is performed to quantitatively evaluate the degradation of scale factor, bias, and bandwidth caused by phase errors at different locations, and to compare their relative influence weights.
Results
Control system of gyroscope and test equipment
The measurement and control system for MEMS gyroscope employs two operational modes:
Drive Mode: Utilizes an automatic gain controller (AGC) to stabilize the amplitude and track frequency through a direct digital frequency synthesizer (DDS). This allows the system to maintain constant vibration amplitude and accurately track the resonance frequency, essential for optimal performance.
Sense Mode: Implements the FTR control method for rate measurement and quadrature stiffness control (QSC) for stiffness coupling. The QSC helps to adjust the stiffness of the system and improve the accuracy of rate measurement. This configuration is crucial for reducing measurement errors caused by stiffness variations in the resonator.
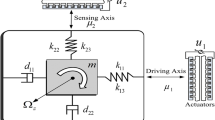
As shown in Fig. 1a, b Capacitor-to-Voltage (C/V) conversion circuit based on a ring diode is used for modal signal pickup, effectively mitigating the feedthrough effect. This design combines the vibration signal with a high-frequency carrier signal, modulating it onto the high-frequency signal, and thereby systematically controlling the conduction and cutoff of the diode to charge and discharge two reference capacitors. After several square wave cycles, the voltage on Cref1,2 gradually stabilizes. Due to the unequal capacitance values of C+ and C−, which are related to ΔC, the charging and discharging currents on the two reference capacitors differ, resulting in a voltage difference. Finally, the voltage variation reflecting ΔC is output through an instrumentation amplifier.

a Diagram of the system and schematic of the electrodes. b C/V conversion circuit. c Synchronous integral demodulation circuit. d Test equipment. e Circuit boards of the system
Subsequently, the modal pickup signal is processed by a third-order synchronous integral demodulator (SID) for low-noise I/Q decomposition, as shown in Fig. 1c. The SID simultaneously controls the conduction direction of three switches using a square wave signal to charge and discharge capacitors C1,3,5 and C2,4,6, and performs a differential operation on the capacitors at the C5 and C6 terminals. When the pickup signal is in phase with the reference demodulation signal, the SID output reflects the in-phase component; when the phase difference between the pickup signal and the reference demodulation signal is 90°, the SID output reflects the quadrature component.
As illustrated in Fig. 1d, the following equipment is necessary for testing: a frequency counter to measure the phase difference of signals, a digital multimeter and a digital oscilloscope to debug the gyroscope system and observe the signals, a DC power supply to provide power to the gyroscope system. Moreover, Fig. 1e depicts the printed circuit boards (PCBs) of the MEMS gyroscope measurement and control system. The PCBs are divided into two sections, labeled A and B. PCB A includes the packaged MEMS resonator, the C/V conversion circuit, the SID circuits, and the 24-bit ADC. PCB B contains the 16-bit DAC in the drive modal feedback path, the 20-bit DAC in the sense modal feedback path, the 16-bit DAC in the QSC loop, and the FPGA.
In summary, the analog circuits of the MEMS gyroscope system consist of the C/V conversion circuit, SID, and differential excitation circuit. The digital circuit comprises the FPGA, and the digital and analog circuits are connected via DACs and ADCs. These circuits inevitably introduce phase errors, which are categorized into phase errors in the forward channel and the feedback channel from the modal control loop discussed in this paper. Additionally, Table 1 lists the parameters of the gyroscope system, providing values for subsequent simulations, where the equivalent quadrature angular velocity corresponding to kxy = 0.0561 N/m is 100°/s.
Dynamical equations of gyroscope
The motion equation of the gyroscope, considering damping coupling and stiffness coupling, can be written as
where x and y represent the displacements of the two operational modes, respectively; m denotes the effective mass in the resonator that participates in the Coriolis vibration; Fx and Fy are the external excitation forces for each mode; dx and dy refer to the damping coefficients for each mode; kx and ky signify the stiffness coefficients for each mode; kxy indicates the stiffness coupling coefficient; dxy represents the damping coupling coefficients; Ωz is the rotation rate in the sensitive direction of the gyroscope.
Neglecting the phase errors, and let Fx=Adsin(ωdt). Considering the in-phase and equivalent quadrature forces, the vibrational displacements of the two modes are as follows
where
Ax represents the vibration amplitude of the drive mode, Ai pertains the value related to the damping coupling and rate, Aq is the value linked to stiffness coupling, ωx,y=2πfx,y.
According to Eqs. (4) and (5), φx and φy are determined by ωd, modal frequency, and modal quality factor. The presence of phase error causes ωx ≠ ωd, which affects the proper operation of the drive modal control loop. Based on the gyroscope system’s parameters, φy = 180° and the phase error introduced by the modal parameters can be neglected. However, phase errors in the C/V conversion, SID, and digital circuit still exist.
Effect of phase errors on drive mode
Based on the above analysis, it is evident that the phase errors in the drive modal control loop can be normalized to two positions: the phase error in the feedback channel (φxe1) and the forward channel (φxe2). φxe1 is the phase error introduced by the FPGA and DAC, which can be equivalent to the sinusoidal signal. φxe2 is the phase error introduced by the C/V conversion circuit, which can be equivalent to the cosine signal. Next, the effects of φxe1 and φxe2 on the drive modal control loop are analyzed.
The first step is to simulate and analyze the influence of φxe1 and φxe2. As shown in Fig. 2a, their effects on the drive modal excitation signal are illustrated. With increasing φxe1 and φxe2, the drive frequency ωd deviates from the natural frequency ωx, indicating that these phase errors hinder frequency tracking from converging to the true ωx. Meanwhile, the amplitude Ad, increases with φxe1 and φxe2 to maintain a constant vibration level at the drive-mode pickoff. Consequently, φxe1 and φxe2 cause ωx ≠ ωd and simultaneously enlarge Ad, which aggravates the feedthrough effect. Since unsuppressed feedthrough can severely deteriorate the accuracy of FTR measurement when using a C/V conversion circuit, it must be carefully considered. Fortunately, as shown in Fig. 1a, the C/V circuit implemented in this study effectively suppresses feedthrough, ensuring that it no longer influences the sense mode. In this case, although the frequencies of the in-phase and equivalent quadrature forces deviate slightly from ωx, the offsets remain much smaller than the modal frequency split.

a Effect of φxe1 and φxe2 on ωd and Ax. b Effect of different ωd on FTR rate measurement and QSC. c Effect of different ωd on FTR bandwidth
When quadrature correction is applied, the step-response curves and magnitude frequency responses of the sense modal control loop at Ωz = −30°/s under different φxe1 and φxe2 values are presented in Fig. 2b, c. Phase errors in the sense-mode control loop (φye1 = −9° and φye2 = −6°) are also considered. The results show that both the step responses and magnitude–frequency characteristics exhibit only minor variations across different frequency cases. These findings indicate that φxe1 and φxe2 exert negligible influence on ZRO, bandwidth, and quadrature stiffness control. The following subsection provides the experimental validation of these simulation results.
Compensation for drive modal phase errors
φxe1 can be obtained from the modal excitation signal (Vx-) and the DDS output signal (sgn[cos(ωdt)] or sgn[sin(ωdt)]). After compensation for φxe1, the φxe2 can be reflected by the magnitude of Ad. Accordingly, the drive modal control loop will be applied to error compensation procedure as follows:
-
1.
The calibration of φxe1 is achieved through the measurement of the phase difference between Vx- and sgn[cos(ωdt)] (or sgn[sin(ωdt)]). Subsequently, the phase of Vx- is adjusted to maintain the orthogonality of Vx- and sgn[cos(ωdt)], while ensuring that they remain in phase with sgn[sin(ωdt)].
-
2.
Following the compensation of φxe1, the amplitude of the drive modal excitation signal (Ax) is reduced by synchronously adjusting the phases of sgn[cos(ωdt)] and sgn[sin(ωdt)], thereby completing the compensation of φxe2.
Initially, tests were conducted to assess φxe1 and φxe2. Figure 3 depicts the phase difference between SID’s reference signal (sgn[sin(ωdt)]、sgn[sin(ωdt+φxe2)]、sgn[cos(ωdt)]、sgn[cos(ωdt+φxe2)]) and Vx- without and with φxe1 and φxe2 compensation for the drive modal control loop at room temperature. As illustrated in Figs. 3a and 3c, the instantaneous phase difference between Vx- and sgn[cos(ωdt)] is demonstrated for the cases of φxe1 and φxe2 uncompensated (case 1), φxe1 compensated with φxe2 uncompensated (case 2), respectively; and Fig. 3e shows the instantaneous phase difference between Vx- and sgn[cos(ωdt+φxe2)] under both φxe1 and φxe2 compensated (case 3). Under room temperature conditions, after powering on the gyroscope and allowing a 1800s warm-up period for the phase errors to stabilize, a two-hour phase error test was conducted; the results are shown in Fig. 3b, d, f. The mean values of φxe1 (Vx- with sgn[sin(ωdt)]) without and with compensation are 3.7647° and 0.0078°, respectively, and the maximum fluctuations are less than 0.0077° and 0.0082°, respectively. The mean value of φxe2 (Vx- with sgn[sin(ωdt+φxe2)]) derived from the calibration was 1.2459°, with a maximum fluctuation of less than 0.0073°. The phase differences depicted in 3a, 3c and 3e are constrained by the precision of the oscilloscope, exhibiting discrepancies from those recorded with the frequency counter in Fig. 3b, d, f. The test results indicate that, after the warm-up process, φxe1 and φxe2 become stable under room temperature conditions and within the experimental time scale, and can thus be treated as constant errors; accordingly, they can be effectively corrected using the aforementioned method.

a φxe1 and φxe2 uncompensated (case 1). b Phase difference test data for case 1. c φxe1 compensated with φxe2 uncompensated (case 2). d Phase difference test data for case 2. e φxe1 and φxe2 compensated (case 3). f Phase difference test data for case 3
Additionally, measurements of φxe1 and φxe2 were conducted under different temperature conditions, with the results summarized in Table 2. It can be observed that the phase errors exhibit certain variations with temperature and tend to increase as the temperature increases. This finding indicates that the phase errors are strongly temperature-dependent and therefore require recalibration when applied across different temperature range.
Subsequently, tests were undertaken to assess the impact of φxe1 and φxe2 on the FTR rate measurement’s performance. Table 3 presents the values of ωd and Ad under the three cases. Following phase error compensation, Ad is reduced, and ωd approaches ωx.
Figure 4 presents the experimental results of the three cases across different performance metrics, including scale factor characteristics, quadrature stiffness correction voltage, zero-rate output (ZRO) performance, and rate measurement bandwidth. For the rate tests, the measurement points were set at ±0.1°/s, ±0.5°/s, ±1°/s, ±5°/s, ±10°/s, ±50°/s, ±100°/s, ±200°/s, ±300°/s, ±400°/s, and ±500°/s. Under −20 °C, room temperature, and 50 °C conditions, the mean value of scale factors of the three cases were 8677, 8651, and 8643, with corresponding standard deviations of 20.84, 27.06, and 28.04. Further comparison shows that the mean nonlinearity values were 351, 325, and 277, with standard deviations of 4.73, 7.64, and 4.16 respectively. The mean asymmetry values were 1241, 1102, and 1014, respectively. Overall, although numerical differences exist among the three cases, the residual fitting curves exhibit similar shapes (see Fig. 4a–c). For quadrature stiffness correction, the average values of Vq at −20 °C, room temperature, and 50 °C were 4.0469, 4.5247, and 4.7182, with corresponding standard deviations of 0.0077, 0.0078, and 0.0088 (see Fig. 4d–f). These results indicate that the Vq increases with temperature, while the fluctuation amplitude remains small at same temperature conditions. For the ZRO performance, the mean bias values were −0.2388, −0.3070, and 0.4502 at −20 °C, room temperature, and 50 °C, with standard deviations of 0.0143, 0.0077, and 0.0081. Allan variance analysis further shows that the mean values of bias instability were 3.6403, 3.8333 and 4.0621, respectively. The mean values of angle random walk (ARW) were 0.1261, 0.1337, and 0.1427 (see Fig. 4g–i). These results demonstrate that the bias and noise characteristics follow relatively consistent trends under the same temperature conditions. Finally, in terms of dynamic performance, the bandwidth tests at room temperature show that the FTR rate measurement bandwidths of all three cases were below 30 Hz and generally consistent with the simulation results (see Fig. 4j–l). The above experimental results are consistent with the simulation results shown in Fig. 2.

a–c scale factor fitting residuals and performance at −20 °C, room temperature and 50 °C. d–f quadrature stiffness correction voltage at −20 °C, room temperature and 50 °C. g–i ZRO’s Allan variance curves at −20 °C, room temperature and 50 °C. j–l Bandwidth curve for case 1, 2 and 3 at room temperature
The aforementioned simulation and test results demonstrate that the phase errors (φxe1 and φxe2) can impede the drive modal control loop’s ability to lock onto the actual modal resonant frequency, consequently increasing the amplitude of the excitation signal. Since the front-end C/V conversion circuit employed in this paper can suppress feedthrough, the enhancement in the amplitude of the excitation signal did not impact the performance of the FTR rate measurement.
Derivation of FTR control loop including phase errors
Following the optimal model of the FTR rate control loop9, a block diagram of the control loop that incorporates phase error is proposed, as illustrated in Fig. 5. The SID functions as a unit-gain multiplier with a low-pass filter (LPF), while Gy(s) represents the sense modal transfer function, and Ffb(s) denotes the transfer function of the FTR controller.

a Control loop before equivalent transformation. b Control loop after step 1. c Control loop after step 2. d Control loop after step 3
Figure 5 shows the block diagram of the FTR rate control loop without the feedthrough, which is transformed into the equivalent unit negative feedback loop after the subsequent three steps:
-
1.
φye1 is equated to the FTR feedback signal in the feedback path, and φye2 is equated to the demodulated reference signal in the forward path, as shown in Fig. 5a. The FTR feedback signal, which incorporates φye1, is transformed as follows
$$\begin{array}{l}{V}_{c}{k}_{vf}\,\sin ({\omega }_{d}t+{\varphi }_{ye1})={V}_{c}{k}_{vf}\cdot \\ \,[\sin ({\omega }_{d}t)\cos \,{\varphi }_{ye1}+\,\cos ({\omega }_{d}t)\sin \,{\varphi }_{ye1}],\end{array}$$(6)where Vckvfsin(ωdt)sinφye1 in Eq. (6) is used to neutralize the Coriolis force, while Vckvfcos(ωdt)cosφye1 can be regarded as a quadrature signal. Consequently, Fig. 5a is transformed into Fig. 5b.
-
2.
The multiplier equivalent in the feedback path, as illustrated in Fig. 5b, is transformed into the forward path, thereby transforming Fig. 5b into Fig. 5c.
-
3.
The gain equivalent in the feedback path, as illustrated in Fig. 5c, is transformed into the forward path, thereby transforming Fig. 5c into Fig. 5d.
-
4.
Furthermore, the Gepe(s) represented in Fig. 5d can be derived as follows9
where
As illustrated in Fig. 5d, the scale factor, which accounts for phase error, can be expressed as follows
Subsequently, the impact of φye1 and φye2 will be analyzed based on the FTR control loop depicted in Fig. 5. Figure 5a can be utilized for time-domain analysis, while Fig. 5d can be employed for frequency-domain analysis. Furthermore, the stiffness correction method is used to suppress quadrature error17.
Effect of phase errors on sense mode
As shown in Fig. 1a, the quadrature error correction methodology includes stiffness correction, and Vq represents the DC slow variable. Thus, the phase error in the feedback path of the QSC loop can be disregarded. However, the phase error in the forward path must be considered. The method for extracting quadrature error and rate information, along with the controller, remains consistent. Consequently, the origin of the phase error in the forward path of the quadrature control loop is similar to that of φye2, showing comparable effects on the control loop. As a result, the phase error in the quadrature correction loop is also normalized to the demodulated reference signal for further analysis.
As demonstrated in Fig. 6a, the influence of φye1 and φye2 on QSC and FTR rate extraction is shown with stiffness coupling correction enabled. Once stiffness coupling is rectified, only φye1 contributes to the extracted quadrature signal. As predicted by (12), the scale factor increases monotonically with φye1, while Vq decreases in accordance with (6). By contrast, the effect of φye2 on both the FTR control loop and the QSC loop is much smaller, as indicated by the near-complete overlap of the green and purple traces with the gray reference.

a Effect of φye1 and φye2 on FTR rate measurement and QSC. b Effect of φye1 and φye2 on FTR bandwidth
As illustrated in Fig. 6b, the magnitude and phase of the FTR rate control loop are presented for a range of φye1 and φye2. Although both parameters induce slight perturbations in the magnitude frequency responses, the bandwidth variation remains less than 0.3 Hz and the associated phase shift is less than 1°. Therefore, the impact of φye1 and φye2 on the bandwidth of FTR measurement is negligible.
Compensation for sense modal phase errors
φye1 can be derived from the phase difference between the FTR feedback signal (Vy-) and sgn[sin(ωdt)]. After compensating for φye1, φye2 can be reflected by the phase difference between the quadrature output signal (Aqcos(ωdt)) and sgn[sin(ωdt)], where Aq needs to be significantly larger than AI. Further rewriting of Eq. (3) yields
where
As demonstrated by Eq. (13), when Aq/AI = 8000, the discrepancy between φiq and 90° is less than 0.0073°, which aligns with the magnitude of phase fluctuation observed by the frequency meter. Additionally, the difference between \({A}_{q}/\sqrt{{A}_{i}^{2}+{A}_{q}^{2}}\) and 1 is significantly less than 0.00001. Therefore, the calibration concerning φye2 can be accomplished by increasing the quadrature signal and decreasing the damped coupling signal in the ZRO case. Subsequently, the sense modal control loop will be applied to a phase error compensation procedure as follows:
-
1.
Firstly, Vy- can be adjusted to ensure that its phase remains in-phase with sgn[sin(ωdt)], thus completing the calibration of φye1.
-
2.
Following the compensation of φye1, the FTR and QSC loops are employed to achieve Aq/AI > 8000. Subsequently, the phase of sense modal demodulation reference signals is adjusted to ensure that it is in phase with y(t), thus completing the calibration of φye2.
As illustrated in Fig. 7, the phase difference between SID’s reference signal (sgn[sin(ωdt)] or sgn[sin(ωdt+φye2)]) and Vy- with y(t) is displayed before and after φye1 and φye2 compensation, following the rectification of the phase errors in the drive modal control loop at room temperature. As illustrated in Fig. 7a, b, the instantaneous phase difference between sgn[sin(ωdt)] and Vy- is demonstrated for the cases of φye1 and φye2 uncompensated (case 3), φye1 compensated with φye2 uncompensated (case 4), respectively. In order to effectively obtain the phase difference between the aforementioned two signals, Vy- is a sine wave signal with a fixed amplitude and a frequency that follows the drive modal frequency. Subsequently, the 2-h phase difference test results (warm-up time of 1800 s) for the above two cases are shown in Fig. 7c. The values of the test means for the two cases were 8.8814 and 0.0079, respectively. The maximum fluctuations were less than 0.0089° and 0.0085°, respectively. The standard deviations were 0.0015° and 0.0014°, respectively.

a Phase difference between sgn[sin(ωdt)] and Vy- under φye1 and φye2 uncompensated (case 3, φxe1 and φxe2 compensated). b Phase difference between sgn[sin(ωdt)] and Vy- under φye1 compensated with φye2 uncompensated (case 4). c Phase difference test data between sgn[sin(ωdt)] and Vy- for case 3 and 4. d Phase difference between sgn[sin(ωdt)] and y(t) under φye1 compensated with φye2 uncompensated (case 4). e Phase difference between sgn[sin(ωdt)] and y(t) under both φye1 and φye2 compensated (case 5). f Phase difference test data between sgn[sin(ωdt)] and y(t) for case 4 and 5
As demonstrated in Fig. 7d, e, the instantaneous phase difference between sgn[sin(ωdt)] and y(t) under the condition of Aq/AI > 8000 is illustrated for the cases of φye1 compensated with φye2 uncompensated (case 4) and both φye1 and φye2 compensated (case 5), respectively. The 2-h phase difference test results (warm-up time of 1800 s) for these two cases are presented in Fig. 7f. The mean test values for the two cases were 1.5560 and 0.0116, and with maximum fluctuations of less than 0.0093° and 0.0088°, respectively. Once again, the phase differences displayed in Fig. 7a, b, d, e deviate from the test results presented in Fig. 7c, f due to the inherent limitations of oscilloscope measurement accuracy. Considering these test outcomes, φye1 and φye2 at room temperature can be regarded as constant errors.
Consistent with the measurement method used for the phase errors in the drive modal control loop, the phase errors in the sense modal control loop were also tested under different ambient temperatures, with the results listed in Table 4. The results indicate that the sense modal phase errors increase as temperature increases. Therefore, the compensation parameters for φye1 and φye2 need to be recalibrated for applications across different temperature ranges.
Subsequently, tests were undertaken to assess the impact of φye1 and φye2 on the FTR rate measurement’s performance. At this juncture, φxe1 and φxe2 underwent compensation. As illustrated in Fig. 8, the impact of φye1 and φye2 on the scale factor test results, ZRO and quadrature stiffness correction voltage, ZRO’s performance, and bandwidth is demonstrated. The test steps, process, and duration are consistent with those shown in Fig. 4.

a–c scale factor fitting residuals and performance at −20 °C, room temperature and 50 °C. d–f quadrature stiffness correction voltage at −20 °C, room temperature and 50 °C. g–i ZRO’s Allan variance curves at −20 °C, room temperature and 50 °C. j–l Bandwidth curve for case 3, 4 and 5 at room temperature
As shown in Fig. 8a–c, under the conditions of −20 °C, room temperature, and 50 °C, the relative deviation rates of the scale factor for case 4 and case 5 were 0.0017, 0.0033, and 0.0040, respectively; in contrast, those for case 3 and case 4 reached 0.0102, 0.0093, and 0.0104, respectively. Further observation indicates that after φye1 compensation, the scale factor decreased, which is consistent with the prediction of Eq. (12). In addition, under different temperature conditions, the mean nonlinearity of the scale factor in case 4 and case 5 was significantly reduced compared with case 3, which agrees with the findings reported in reference [12]. From the Vq test results shown in Fig. 8d–f, the relative deviation rates for case 4 and case 5 were 0.0033, 0.0029, and 0.0035 under the three temperature conditions, whereas those for case 3 and case 4 were much larger, at 0.0538, 0.0749, and 0.0722, respectively. Similarly, the ZRO test results in Fig. 8g–i reveal that the relative deviation rates of the bias for case 4 and case 5 were only 0.0608, 0.0502, and 0.0328, while the corresponding values for case 3 and case 4 were 0.4026, 0.1718, and 0.2279, respectively. Further analysis shows that the BI and ARW exhibited similar trends in relative deviation rates. Finally, as illustrated in Fig. 8j–l, the bandwidth test results at room temperature indicate that the bandwidths of all three cases were below 30 Hz and showed no significant difference from the simulation results. In summary, the above experimental results are consistent with the simulation results shown in Fig. 6. It can therefore be concluded that φye1 has a considerable influence on the scale factor and ZRO performance, while the effect of φye2 can be neglected. Moreover, neither φye1 nor φye2 exerts a significant impact on the bandwidth of FTR rate measurement.
Discussion
This paper addresses the phase errors in the control loop of the MEMS gyroscope with FTR rate measurement and quadrature stiffness correction, based on the use of ring diodes paired with a carrier wave circuit to suppress feedthrough. The phase errors in the control loops of the operational modes can be classified into two categories: phase error in the feedback path and phase error in the forward path. The phase errors in the feedback paths of the two operational modes are primarily attributable to the solving process in the FPGA and the DAC conversion process, while the C/V conversion circuit predominantly causes the phase errors in the forward paths.
The presence of φxe1 and φxe2 shifts the locking point of the control loop away from the drive modal frequency, thereby increasing the amplitude of the drive excitation. After applying the compensation procedure to φxe1 and φxe2, and following an 1800-s warm-up under room-temperature conditions, the phase deviation in cases 1, 2, and 3 remained within 0.009° over a two-hour period. This indicates that, when the ambient temperature is stable, the phase error in the drive mode can be treated as a constant. Under the same environmental conditions, the relative deviations of the scale factor, bias, ARW, and quadrature stiffness correction voltage among the three cases were all less than 0.09, and the bandwidth test results at room temperature showed no significant differences. Therefore, it can be concluded that the drive modal phase errors have no discernible effect on the performance of FTR rate measurement.
For the sense modal FTR rate control loop, a control model and transfer function incorporating φye1 and φye2 were constructed and derived, and both parameters were compensated according to the established procedure. Under room-temperature conditions with an 1800 s warm-up, the phase deviations of cases 3, 4, and 5 fluctuated within 0.01° over a two-hour period, indicating that the phase errors in the sense modal control loop can be regarded as constant when the temperature is stable. Further comparisons show that, across three temperature environments, the relative deviation rates of the scale factor, bias, quadrature stiffness correction voltage, and ARW for cases 4 and 5 were all below 0.07, suggesting that the influence of φye2 on the scale factor and static performance can be neglected. In contrast, the relative deviation rates of these performance parameters for case 4 compared with case 3 increased by more than 2.5 times, demonstrating that φye1 significantly deteriorates the static performance and scale factor characteristics. However, bandwidth tests under room-temperature conditions indicate that the effects of φye1 and φye2 on bandwidth performance are negligible.
Table 5 lists the relative deviation of the gyroscope’s static and dynamic performance metrics after compensating for different phase errors. The results indicate that the phase errors in the drive modal control loop and in the forward path of the sense modal control loop have no significant impact on the static or dynamic performance of FTR rate measurement. In contrast, the phase error in the feedback path of the sense modal control loop exerts a pronounced influence on the static characteristics of FTR rate measurement, as well as on the scale factor value and its nonlinearity, while its effect on bandwidth remains negligible.
Accordingly, with feedthrough effects excluded, this study elucidates the underlying mechanisms of phase errors, with particular emphasis on the influence of the phase error in the feedback path of the sense modal control loop on the static and dynamic performance of the FTR gyroscope. The results demonstrate that this phase error serves as a dominant factor contributing to performance degradation, exerting a pronounced effect on ZRO and scale factor characteristics. The dominant phase error sources are identified and clarified, providing a theoretical foundation and direction for real-time phase error compensation and performance optimization of FTR gyroscopes.
Subsequently, research will be conducted on the drift patterns and compensation methods of phase error in the feedback path of the sense modal control loop across a wide temperature range, aiming to minimize the impact of phase error on the dynamic and static performance of the gyroscope. Although the primary objective of this paper is to clarify the influence mechanisms and relative weights of phase errors at different locations within the FTR rate gyroscope measurement and control system on both static and dynamic performance. Table 6 additionally compares the performance before and after phase error compensation reported in different studies, including BI, ARW, and scale factor nonlinearity (SF Non). This comparison provides a quantitative reference for the conclusions of this work and facilitates the assessment of the practical benefits of different compensation strategies.
Materials and methods
The MEMS dual-mass resonator discussed in this paper utilizes single-crystal silicon with a < 100> crystal orientation as the main material for fabrication, employing the deep dry silicon on glass process for resonator fabrication. In addition to excitation and pickoff electrodes for two operational modes, the resonator also has stiffness coupling correction electrodes. The stiffness coupling correction electrodes are characterized by a gap-change structure, exhibiting unequal spacing, and employs the electrostatic negative stiffness effect to achieve quadrature error correction. The resonator operates at a frequency of 11 kHz, with a frequency split of 139 Hz. Subsequent to encapsulation, the quality factor of the operational mode exceeds 200000. The gyroscope control system utilizes the high-frequency carrier in conjunction with the ring diode to extract the operational mode vibration signal and suppress the feedthrough effect. The carrier signal is generated by an active crystal oscillator with a frequency of 8 MHz, and the ring diode uses HSMS-2829-BLKG. Additionally, the FPGA employed in the gyroscope control system is designated as the EP4CE115F23I7N, with an external clock source configured as a 26 MHz active crystal oscillator (ECS-TXO-32CSMV-260-AN-TR). The 16-bit DAC utilized for drive modal excitation is the DAC8811IBDRBT, the 20-bit DAC employed for FTR control is the AD5791BRUZ, the 16-bit DAC utilized for quadrature stiffness correction is the DAC82002DRXR, the ADC employed for operational mode signal acquisition is the ADS1298IPAGR. The operational amplifier employed is the AD8597ARZ. The update rate of the above three DACs is 1 MHz, and the sampling rate of the ADC is set to 8 kHz.
References
Shen, Q. et al. Bias accuracy maintenance under unknown disturbances by multiple homogeneous MEMS gyroscopes fusion. IEEE Trans. Ind. Electron. 70, 3178–3187, https://doi.org/10.1109/TIE.2022.3167137 (2023).
Huang, F. et al. A MEMS IMU gyroscope calibration method based on deep learning. IEEE Trans. Instrum. Meas. 71, 1–9, https://doi.org/10.1109/TIM.2022.3160538 (2022).
Mi, J., Wang, Q. & Han, X. Low-cost MEMS gyroscope performance improvement under unknown disturbances through deep learning-based array. Sens. Actuators A Phys. 368, 115086. https://doi.org/10.1016/j.sna.2024.115086 (2024).
Bianchi, V. et al. IoT wearable sensor and deep learning: an integrated approach for personalized human activity recognition in a smart home environment. IEEE Internet Things J. 6, 8553–8562, https://doi.org/10.1109/JIOT.2019.2920283 (2019).
Miao, T. et al. Virtual rotating MEMS gyrocompassing with honeycomb disk resonator gyroscope. IEEE Electron Device Lett. 43, 1331–1334, https://doi.org/10.1109/LED.2022.3185985 (2022).
Ren, J. et al. An automatic q-factor matching method for eliminating 77% of the ZRO of a MEMS vibratory gyroscope in rate mode. Microsyst. Nanoeng. 10, 67, https://doi.org/10.1038/s41378-024-00695-4 (2024).
Wang, S. et al. Challenges in implementing pitch/roll rate integrating gyroscopes: a case study on a new dynamically balanced dual-mass resonator. IEEE Sens. J. 23, 27068–27075, https://doi.org/10.1109/JSEN.2023.3314897 (2023).
Nastri, R. et al. Low-motion amplitude operation of Lissajous frequency modulated MEMS gyroscopes for spurious harmonics reduction. IEEE Sens. Lett. 7, 1–4, https://doi.org/10.1109/LSENS.2023.3316931 (2023).
Jia, J. et al. In-run scale factor compensation for MEMS gyroscope without calibration and fitting. IEEE Sens. J. 21, 7316–7325, https://doi.org/10.1109/JSEN.2020.3044148 (2020).
Bu, F. et al. Effect of circuit phase delay on bias stability of MEMS gyroscope under force rebalance detection and self-compensation method. J. Micromech. Microeng. 29, 095002, https://doi.org/10.1088/1361-6439/ab27e8 (2019).
Wu, H. et al. Effects of both the drive-and sense-mode circuit phase delay on MEMS gyroscope performance and real-time suppression of the residual fluctuation phase error. J. Micromech. Microeng. 31, 055006, https://doi.org/10.1088/1361-6439/abec1b (2021).
Kuang, Y. et al. Real-time phase compensation for scale factor nonlinearity improvement over temperature variations for MEMS gyroscope. J. Microelectromech. Syst. 32, 305–313, https://doi.org/10.1109/JMEMS.2023.3279653 (2023).
Zhou, Y. et al. An Automatic Phase Error Compensation Procedure For MEMS Quad Mass Gyroscope. IEEE Sens. J. https://doi.org/10.1109/JSEN.2024.3394902. (2024).
Saukoski, M., Aaltonen, L. & Halonen, K. A. I. Effects of synchronous demodulation in vibratory MEMS gyroscopes: a theoretical study. IEEE Sens. J. 8, 1722–1733, https://doi.org/10.1109/JSEN.2008.2004302 (2008).
Omar A. et al. Analyzing the impact of phase errors in quadrature cancellation techniques for MEMS capacitive gyroscopes. in 2018 IEEE SENSORS(IEEE, 2018) 1-4.https://doi.org/10.1109/ICSENS.2018.8589776.
Pagani, L. G. et al. Direct phase measurement and compensation to enhance MEMS gyroscopes ZRO stability. J. Microelectromech. Syst. 30, 703–711, https://doi.org/10.1109/JMEMS.2021.3096031 (2021).
Jia, J. et al. Demodulation phase angle compensation for quadrature error in decoupled dual-mass MEMS gyroscope. J. Micro/Nanolithogr., MEMS, MOEMS 17, 035001–035001, https://doi.org/10.1117/1.JMM.17.3.035001 (2018).
Zhao, M. et al. An interface ASIC for an atmospheric-pressure MEMS gyroscope with PLL-based phase adjustment and SC amplitude regulation. in 2020 IEEE International Symposium on Circuits and Systems (IEEE, 2020) 1–5. https://doi.org/10.1109/ISCAS45731.2020.9180393.
Liu, M. et al. A phase compensation method for MEMS quadruple mass gyroscope in zero bias drift. IEEE Sens. J. 21, 3087–3096, https://doi.org/10.1109/JSEN.2020.3026754 (2020).
Ezekwe, C. D., Geiger, W., Ohms, T. 27.3 A 3-axis open-loop gyroscope with demodulation phase error correction. in 2015 IEEE International Solid-State Circuits Conference (IEEE, 2015) 1–3. https://doi.org/10.1109/ISSCC.2015.7063134.
Xia, G. M., Yang, B., Wang, S. R. Phase correction in digital self-oscillation drive circuit for improve silicon MEMS gyroscope bias stability. in 2010 10th IEEE International Conference on Solid-State and Integrated Circuit Technology (IEEE, 2010) 141–1418. https://doi.org/10.1109/ICSICT.2010.5667594.
Ma, W. et al. One-time frequency sweep to eliminate IQ coupling in MEMS vibratory gyroscopes. in 2016 IEEE International Conference on Manipulation, Manufacturing and Measurement on the Nanoscale (IEEE, 2016) 273–277. https://doi.org/10.1109/3M-NANO.2016.7824917.
Zhou, Y. et al. A rapid circuit phase error identification and compensation method for MEMS QMG achieving 99.7% reduction in ZRO drift. J. Microelectromech. Syst. (2024). https://doi.org/10.1109/JMEMS.2024.3424810.
Acknowledgements
This work was supported in part by Basic Science (Natural Science) Research Project of Higher Education Institutions in Jiangsu Province of China under Grant 23KJB590001, in part by Foundation of Key Laboratory of Micro-Inertial Instrument and Advanced Navigation Technology, Ministry of Education, China under Grant SEU-MIAN-202403, in part by National Key Research and Development Program of China under Grant No.2022YFB3205000, in part by National Natural Science Foundation of China under Grant No.52475586 and U2230206. The authors would like to thank you for the above support.
Author information
Authors and Affiliations
Contributions
Jia Jia proposed the calibration method for phase errors and wrote the manuscript. Huiliang Cao provided valuable comments on the writing and provided the resonator. Shixuan Gao participated in the hardware circuit design. Han Zhang and Fang Chen conducted simulations and experiments on phase errors and performed data analysis. Yang Gao was responsible for the design and simulation of the resonator.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Jia, J., Zhang, H., Gao, S. et al. Phase error analysis for MEMS gyroscopes operational modes based on force-to-rebalance rate measurement mode. Microsyst Nanoeng 12, 86 (2026). https://doi.org/10.1038/s41378-025-01144-6
Received:
Revised:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41378-025-01144-6
