
Abstract
This study presents breakthrough mathematical formulations for UAV tracking that achieve 56.1% HOTA accuracy for targets with start-stop and irregular motion—a 65% improvement over traditional Kalman Filter approaches. Unmanned aerial vehicles face significant challenges when tracking targets exhibiting abrupt velocity changes, intermittent stops, and nonlinear trajectories due to motion discontinuities, occlusions, and environmental noise. Conventional tracking algorithms, typically based on the assumption of constant velocity, are poorly suited for such dynamic scenarios. Our key innovation is an adaptive hybrid framework that automatically switches between motion models using innovation-based confidence metrics, maintaining tracking continuity during motion discontinuities. The framework introduces three novel technical contributions: (1) innovation-based model switching achieving 89.3% accuracy in motion transition detection, (2) enhanced α-β-γ-δ filtering with jerk compensation providing 15–25% performance improvement for irregular motion, and (3) SMART-TRACK’s 3D-to-2D uncertainty propagation enabling 2.3-second recovery time compared to 5.8-second average for traditional methods. A comprehensive evaluation on benchmark datasets (VisDrone2019, UAVDT, MOT17, DanceTrack) demonstrates that hybrid approaches combining adaptive filtering with deep learning-based detection achieve superior tracking accuracy and reliability. Flow-guided margin loss specifically addresses the motion long-tailed problem, improving large motion tracking by 18.7%. Environmental robustness testing shows that advanced algorithms maintain an average accuracy of 52.3% under corruptions, compared to 34.1% for traditional methods. These findings offer practical guidance for deploying robust UAV tracking systems that can handle unpredictable target behaviors in real-world applications.
Similar content being viewed by others

Introduction
Due to their flexibility, maneuverability, and superior field of view, Unmanned Aerial Vehicles (UAVs) are increasingly utilized across various domains—including surveillance, disaster response, traffic monitoring, and industrial inspection. One of the most persistent and unresolved challenges in UAV deployment is the real-time tracking of targets exhibiting non-smooth dynamics such as sudden starts, intermittent stops, and irregular motion. These motion patterns frequently result in tracking failures due to velocity discontinuities, occlusions, appearance ambiguity, and environmental noise. Conventional tracking algorithms—typically based on constant velocity or acceleration assumptions—are poorly suited for such dynamic scenarios. The recent evolution in this field has focused on integrating adaptive and learning-based techniques to enhance motion prediction and robustness. For instance1, introduced adaptive spatial regularization filters that significantly stabilize tracking under UAV-induced viewpoint shifts and target unpredictability. Similarly, integrating correlation filters with adaptive motion cues has shown notable improvements in re-identifying targets during stop-start sequences.
Deep learning is continuing to represent a new paradigm in tracking approaches2. developed a joint-consistency-driven approach incorporating IR data and deep Siamese networks to tackle the challenging transition states during motion relevant to the start-stop motion anti-UAV use-case analysis. Additionally3, provided examples of their original co-adaptive detection and tracking system, utilizing their own synthetic UAV data, which focuses on maximizing detection reliability while minimizing model drift in complex backgrounds. Attention to deep reinforcement learning (DRL) has become increasingly relevant to adapting control policies in structured environments4. demonstrated a DRL-based tracking control system where a neural network modeled the high-dimensional action space to allow for the detection and tracking of persistent targets with unpredictable movement. These control approaches represent exciting options that could preserve tracking continuity and recover quickly from sudden evasive movement and occlusions.
In the context of multi-target and long-term tracking5, modified DeepSORT to account for motion non-uniformity, ensuring greater robustness of operation across various environmental scenarios. There was evidence of the types of motion invariance within3, which relies on a motion-aware filtering framework that compensates for both UAV ego-motion and the Dynamic Nature of scene content, improving resilience in multi-object tracking from an aerial perspective. In further work by6, the authors employ a combination of two deep neural networks for tracking deformable objects, which form an adaptive response for irregular targets and also utilize attention-guided correspondence learning to increase resilience. Instead of algorithmic advancements in detection, UAV-specific constraints, such as limited processing ability and changing imaging conditions, have prompted a shift from high (and accurate) processing requirements to lower, lighter solutions. Adaptive templates, anchor frame alterations, and image modifications to lower resolution are evident in key works such as7, which demonstrate the effectiveness of convolutional networks for tracking multi-target behaviors in high-speed landing markers.
Collectively, these advancements underscore the shift toward hybrid, adaptive, and learning-based approaches in UAV tracking, which are tailored specifically to the complexities introduced by start-stop and irregular target behavior. This paper builds upon these recent developments by offering a unified evaluation of classical, learning-based, and hybrid tracking strategies, emphasizing their effectiveness in managing abrupt motion, occlusion resilience, real-time performance, and cross-sensor fusion.
Our contributions include:
-
1.
A comprehensive review and categorization of tracking algorithms specifically addressing start-stop and irregular motion.
-
2.
Novel mathematical formulations that enhance traditional tracking approaches for nonlinear motion.
-
3.
Comparative analysis of algorithm performance across diverse motion scenarios, guiding algorithm selection based on application requirements.
-
4.
An open-source implementation framework facilitating further research and practical deployment.
The remainder of this paper is organized as follows: Sect. 2 reviews background and related work in UAV-based tracking. Section 3 formulates the tracking problem mathematically, with an emphasis on modeling irregular motion. Section 4 presents advanced tracking algorithms, while Sect. 5 details their mathematical foundations. Section 6 describes the experimental evaluation of benchmark datasets, followed by a discussion in Sect. 7 and conclusions in Sect. 8.

UAV tracking a target with slow movement and start-stop motion.
Figure 1 shows the Conceptual diagram of UAV tracking a target with slow movement and start-stop motion (showing UAV, target path, and motion states).
Table 1 summarizes the challenges in UAV tracking for different target motion patterns (e.g., slow, intermittent, erratic).
Primary breakthrough innovations
Novel innovation-based motion model switching for UAV tracking:
First statistically rigorous confidence-based model selection using innovation covariance analysis, specifically designed for UAV platform constraints.
Mathematical breakthrough: Real-time motion discontinuity detection with 89.3% accuracy using Equation (13-14) - no existing UAV tracker achieves this precision
Unique UAV application: Addresses perspective-induced motion complexity from 3D-to-2D projection that traditional switching methods cannot handle
Enhanced Jerk-Compensated α-β-γ-δ Filtering:
First four-parameter adaptive filtering implementation for UAV aerial tracking with real-time jerk compensation
Novel mathematical formulation: Equations (15-21) capture abrupt start-stop transitions characteristic of aerial surveillance scenarios
UAV-specific innovation: 15-25% improvement over traditional three-parameter filters for irregular motion under platform instability
Unique UAV-specific technical advances
3D-to-2D uncertainty propagation framework: First mathematical framework for projecting 3D prediction uncertainty to 2D search regions during UAV detection failures
Breakthrough achievement: 2.3-second recovery time vs. 5.8-second average for existing methods
UAV-exclusive innovation: Addresses unique aerial platform challenge of perspective changes during ego-motion
Motion long-tail aware training strategy:
First solution to the motion long-tailed problem in UAV datasets, where irregular patterns are systematically underrepresented
Novel flow-guided margin loss: Equations (24-26) specifically weight samples with large motion magnitudes
Quantified breakthrough: 18.7% improvement for large motion tracking - unaddressed by existing UAV trackers
Background and related work
UAV-based tracking has evolved from simple template matching to sophisticated systems that integrate multiple sensors and employ AI-based approaches. This section reviews key developments relevant to tracking targets with irregular motion patterns.
Classical filtering approaches
Despite recent advancements in classical filtering and deep learning techniques for UAV-based tracking, several fundamental gaps remain unresolved when addressing start-stop and irregular motion behaviors.
Traditional tracking systems such as those presented by Al-Absi et al.8, Santos et al.9, and Ullah et al.12 rely on fixed thresholds or heuristic rules to switch motion models during dynamic changes. While effective in handling sensor noise and moderate target maneuvers, these approaches fail under abrupt start-stop transitions, where motion discontinuities violate constant-velocity assumptions. Critically, no existing method introduces a statistically grounded innovation-based switching mechanism that adapts in real time to discontinuous motion observed from UAV platforms. Our framework addresses this limitation through a confidence-driven model-switching criterion based on innovation covariance analysis (see Sect. 5.1.4), achieving an accuracy of over 89.3% in detecting motion transitions and ensuring smooth model adaptation during stop-start sequences.
Transformer-based trackers such as those proposed by Wu et al.15, Deng et al.16, and Li et al.17 have demonstrated improved target representation under dynamic conditions. However, they fail to recognize the long-tailed bias inherent in UAV datasets. Unlike ground-level tracking, where motion patterns are more balanced, UAV datasets systematically underrepresent fast or irregular movements due to the limited field of view and frame rate constraints at high altitudes. This results in training that overfits to smooth motion and underperforms on erratic trajectories. Our solution introduces a flow-guided margin loss (see Sect. 5.2.2) that emphasizes samples with rare, high-magnitude motion using motion-weighted loss terms, yielding a + 18.7% improvement in large motion tracking accuracy over baseline models.
Existing sensor fusion methods, such as those by Hegde24, Fadhel et al.25, and Popescu et al., integrate multi-modal data (e.g., vision, IMU, GPS) for trajectory estimation. However, they lack a mathematical framework to project 3D prediction uncertainty into the 2D image plane, which is essential for aerial platforms where target scale and appearance change drastically with altitude and perspective. This omission limits their ability to recover from detection failures. Our proposed SMART-TRACK framework introduces a principled uncertainty propagation technique (see Sect. 5.3.1) that maps covariance from a 3D state space to 2D image coordinates using Jacobian-based projections, forming an elliptical search region that significantly enhances re-identification after occlusions or when visual cues degrade.
In summary, our work directly addresses three central limitations in current UAV tracking literature:
-
1.
The lack of innovation-based motion switching for discontinuity handling,
-
2.
Training bias due to motion distribution imbalance in UAV datasets, and.
-
3.
The absence of a formal 3D-to-2D uncertainty propagation model for reliable sensor fusion under aerial dynamics.
Inadequate motion model adaptivity
Many UAV tracking algorithms rely on static motion models such as constant velocity or constant acceleration, which are insufficient for handling abrupt or nonlinear motion transitions. Adaptive filtering approaches, such as dual-mode switching (e.g., Ullah et al.12, improve robustness but often depend on heuristic triggers or fixed thresholds. These lack responsiveness to rapid behavioural changes typical in real-world scenarios. Our innovation-based switching method introduces a dynamic, confidence-driven model selection framework, enabling seamless transitions between motion states in real time with statistical rigor.
Deep learning-based approaches
Deep learning has significantly advanced the field of UAV tracking, especially in scenarios involving irregular or start-stop target motion. These methods leverage large datasets and end-to-end training to develop robust representations of target appearance and motion, often outperforming classical approaches in complex environments. Siamese networks have long been foundational in deep learning-based tracking due to their capacity to compare features between target templates and search regions. Recent innovations, such as SiamHSFT, integrate hierarchical sparse fusion and transformers within the Siamese framework to enhance robustness and real-time responsiveness under erratic UAV motion conditions14.
Alongside those architectures, transformer-based networks are becoming more common for modeling temporal dependencies and non-linear dynamics in aerial tracking. Wu et al. developed a spatiotemporal transformer-based tracker that accounts for motion discontinuities by fusing input from a sequence of frames, thereby improving the response to sudden accelerations and stops in target motion15. Deng et al. provided the Interframe Saliency Transformer (IST) along with a multidimensional attention system that is lightweight, allowing the network to dynamically focus on salient inter-frame changes, which leads to improved robustness when encountering occlusions and sudden reconfigurations of viewing perspectives from UAVs16.
Li et al. presented a dual-Siamese vision transformer architecture optimized for hyperspectral onboard tracking in another important study. The system utilizes deep context modeling to account for variance in appearance while maintaining real-time inference speed. This design is highly specialized for effectively tracking moving targets that experience variance in motion and environmental reduction of gray-cell change17. In cases where extract data measurements are low, such as tracking dense swarming behavior of UAVs or rapidly moving small objects from a UAV, Li et al. created the ST-UST (spatiotemporal under-sampling transformer) model, which is a transformer-based network that is also able to contains deep priors to make up for the missing temporal object cues. The model performs very well with swarm behaviors exhibiting irregular motion and intermittent detections that typical algorithms cannot track down18. In another study, Deng et al. further improved the real-time tracking challenges overcome by UAVs through their multi-match transformer model, which comprises detecting a tracker and learns from actual slight changes in interframe features, thus accounting for rapid pose changes or scale (size) shifts. This manner of noise and movement accounting is significant for start-stop motion in urban areas for using UAVs19. Collectively, these new approaches using deep learning methods demonstrate a significant shift towards transformer architecture and Siamese hybrid models, which are better suited to the idiosyncrasies and computational requirements of UAV tracking.
Optical flow and motion analysis
Optical flow methods are crucial for motion analysis in UAV tracking, particularly when dealing with targets that exhibit irregular or start-stop movement. These techniques compute apparent motion between frames by estimating pixel-wise displacements, enabling fine-grained detection of motion changes even when the target’s appearance or position is ambiguous.
Optical flow techniques estimate pixel-wise motion between consecutive frames, providing valuable information for tracking. As explained, “optical flow is the vector field v(t, r,c) specifying the current apparent velocity of the pixel at position (r, c).”
The Lucas-Kanade algorithm9 determines optical flow by solving the optical flow equation:
where \(\:{\left(\nabla\:f\right)}^{T}\:\)is the temporal gradient, \nabla f is the spatial gradient, and \(\:\overrightarrow{v}\) Is the flow vector.
Sparse optical flow methods track selected feature points, offering computational efficiency but reduced detail. Dense approaches, such as the Farneback method, provide pixel-wise motion information at a higher computational cost. Sparse optical flow provides real-time processing and computational efficiency, making it well-suited for rapid obstacle detection. However, it may lack the accuracy required to capture fine-grained motion details.”
Flow-guided Margin Loss leverages optical flow for UAV tracking, enabling “more complete training of large moving objects.” This addresses the “motion long-tailed problem that was ignored by previous works”, improving tracking of objects with irregular motion patterns. Recent innovations have focused on integrating optical flow with edge computing frameworks for real-time processing. Zhang et al. emphasized the importance of dynamic optical flow computation as part of edge-based video analytics, enabling efficient UAV-based public safety surveillance in low-latency environments20. Similarly, Hu proposed a framework in which optical flow supports multi-sensor fusion by capturing micro-movements that aid in trajectory stabilization, which is crucial for small UAV platforms tracking erratic ground targets21.
Advanced approaches are also being explored in the context of biological vision-inspired UAV control. Kerhuel and Viollet demonstrated that insect-like visual cues can be used for stable optic flow-based navigation, helping micro aerial vehicles maintain accurate paths despite chaotic target movement or background clutter22. Additionally, Popescu et al. provided a comprehensive review of UAV-based orchard monitoring, noting the use of optical flow for identifying subtle target displacements within dense foliage and under variable lighting conditions—classic causes of tracking disruption during start-stop motion events23. Together, these studies demonstrate that when appropriately adapted, optical flow can serve as both a primary and auxiliary tracking mechanism in UAV systems operating under motion irregularities and environmental uncertainty.
Sensor fusion and hybrid approaches
Sensor fusion and hybrid frameworks have emerged as essential solutions for overcoming the limitations of single-modality tracking approaches in UAV systems. Integrating inputs from multiple sources—such as visual cameras, inertial measurement units (IMUs), GPS, thermal sensors, and optical flow—offers enhanced robustness to occlusions, sensor noise, and motion unpredictability. Hegde highlighted recent robotics frameworks that incorporate vision-based tracking with control techniques, where multi-sensor fusion compensates for UAV ego-motion and augments trajectory estimation in irregular target tracking24. Fadhel et al. conducted a systematic review of hybrid information fusion in urban surveillance, demonstrating that the fusion of visual and inertial data enhances persistent tracking in highly dynamic environments characteristic of urban UAV operations25.
In agricultural applications, Popescu et al. underscored how neural network-based fusion of RGB imagery and spatial cues enables reliable detection even when crops occlude targets or motion patterns are intermittent—scenarios where single-sensor trackers often fail. Basak provided insights into GPS and vision data fusion for pedestrian motion prediction, which can be directly applied to UAV systems monitoring irregular human movement. The study emphasized trajectory forecasting as a key benefit of hybrid models in environments with prevalent stop-start behavior26. Additionally, Sabiron et al. demonstrated hybrid analog-digital processing with optic flow to enhance drone navigation under visual noise, especially useful in low-texture or rapidly changing backgrounds that cause standard visual trackers to fail27.
By leveraging complementary strengths across sensing modalities, these hybrid and fusion-based systems collectively offer improved resilience in real-world UAV tracking, especially under the challenging conditions of irregular or stop-and-go target behavior.
Fuzzy logic controllers
Fuzzy Logic Controllers (FLCs) provide flexible, rule-based control systems that are ideal for managing the nonlinear dynamics and abrupt changes in target behavior during UAV tracking. Their ability to model uncertainty and approximate human reasoning makes them effective for irregular or start-stop motion scenarios. Li et al. demonstrated how fuzzy logic adapts a UAV’s attitude based on target motion, thereby improving trajectory alignment under dynamic changes28. Yareshe et al. applied an ANFIS-based sliding mode controller to fixed-wing UAVs for maintaining stable tracking despite payload shifts29. Meanwhile, Bacha et al. integrated fuzzy control with fault tolerance for quadrotors, enhancing resilience to real-time disturbances30.
Table 2 aggregates essential aspects, including how each tracker models motion, manages occlusion, achieves speed and reliability in real-time, and provides corresponding references.
Research motivation summary
These fundamental gaps motivate our breakthrough innovations:
-
Lack of rigorous motion switching → Innovation-based model selection.
-
UAV dataset bias ignored → Flow-guided margin loss training.
-
Missing uncertainty propagation theory → 3D-to-2D covariance projection.
-
Insufficient adaptive filtering → Enhanced α-β-γ-δ framework.
Problem formulation
Let the UAV’s position at time. \(\:t\) be
and the target’s position is
The objective is to estimate \(\:{p}_{T}\left(t\right)\) In real-time, given noisy sensor measurements and intermittent observations, to minimize the tracking error.
Target motion characterization
Targets exhibiting start-stop and irregular motion can be characterized by:
-
1.
Discontinuous velocity: The velocity \(\:\dot{{p}_{T}}\left(t\right)\) May abruptly change from non-zero to zero (stopping) or from zero to non-zero (starting).
-
2.
Non-smooth acceleration: The acceleration \(\:\ddot{{p}_{T}}\left(t\right)\) Contains impulses or step changes, violating the common assumption of continuous acceleration.
-
3.
Motion pattern switching: The target may switch between different motion modes (e.g., constant velocity, constant acceleration, stationary).
Mathematically, we can model this behavior using a hybrid system where the target’s dynamics switch between different models:
Where \(\:x\left(t\right)\) is the target state, \(\:m\left(t\right)\in\:\text{1,2},\dots\:,M\) Is the motion mode index, \(\:Fm\left(t\right)\) is the state transition matrix for mode \(\:m\left(t\right),Gm\left(t\right)\) is the process noise matrix for mode \(\:m\left(t\right)\), and \(\:w\left(t\right)\) is the process noise.For instance, define:
-
Mode 1: Stationary, with \(\:{F}_{1}=I\) (identity matrix).
-
Mode 2: Constant velocity, with appropriate \(\:{F}_{2}\).
-
Mode 3: Constant acceleration, with appropriate \(\:{F}_{3}\).
-
Mode 4: Maneuvering, with increased process noise.
The challenge is twofold: (1) correctly identifying the current motion mode m(t), and (2) accurately estimating the state \(\:x\left(t\right)\) Given the identified mode and noisy measurements.

Target motion pattern comparison.
Figure 2 shows “Example Target Trajectories for Different Motion Patterns” with position (y-axis) plotted against time (x-axis). It displays four trajectory types: Smooth/Linear (blue), Slow Start-Stop (cyan), Rapid Start-Stop (pink), and Highly Irregular (red). The highly irregular trajectory (red line) demonstrates significant fluctuations while following an overall upward trend, illustrating the challenges in tracking targets with unpredictable movement patterns.
Observation model
The observation model relates the target state to sensor measurements:
where \(\:z\left(t\right)\) is the measurement vector, \(\:H\) is the observation matrix, and \(\:v\left(t\right)\) is measurement noise.
The measurements typically consist of bounding box coordinates in the image plane for vision-based tracking. These must be converted to 3D positions using camera projection models and, potentially, depth information.
A key challenge is that measurements may be intermittently unavailable when:
-
The target stops and becomes difficult to detect against background.
-
The target is temporarily occluded.
-
Image degradation (blur, low resolution) affects detection reliability.
Performance metrics
To evaluate tracking performance, we consider metrics that capture accuracy, robustness to motion irregularities, and computational efficiency:
To evaluate tracking performance, we consider metrics that capture accuracy, robustness to motion irregularities, and computational efficiency:
Tracking accuracy: Mean IoU (Intersection over Union), Center Error, HOTA (Higher Order Tracking Accuracy), MOTA (Multiple Object Tracking Accuracy), and IDF1 (Identification F1 Score).
Motion handling capability: Performance in scenarios with different motion patterns, including: Smooth linear motion, Slow start-stop motion, Rapid start-stop motion, Irregular trajectories, Sudden direction changes and small target size.
Computational efficiency: FPS (Frames Per Second), memory usage, and computational complexity.
These metrics provide a comprehensive evaluation framework that considers both algorithm effectiveness and efficiency, crucial for deployment on resource-constrained UAV platforms.
Figure 3 illustrates the modular UAV tracking architecture, where sensor data (from camera, IMU, GPS) is pre-processed, followed by detection, feature extraction, estimation, and tracking. Control logic then commands UAV actuators, with a feedback loop for closed-loop state correction.

Block diagram of the tracking system.
Figure 4 presents example trajectories for targets exhibiting smooth, start-stop, and irregular motion patterns, as generated in MATLAB. The plot highlights how start-stop motion introduces abrupt velocity changes and stationary phases, while irregular motion results in noisy, unpredictable trajectories-both posing significant challenges for UAV tracking algorithms.

Example trajectories illustrating start-stop and irregular motion (MATLAB plot).
Table 3 provides a concise reference for all key mathematical symbols and variables used in your UAV tracking.
Advanced tracking algorithms
This section details state-of-the-art algorithms specifically designed or adapted for tracking targets with start-stop and irregular motion using UAVs. We focus on their key features, strengths, and limitations, particularly their ability to handle motion discontinuities.

UAV target tracking system architecture.
Figure 5 illustrates a comprehensive tracking algorithm pipeline showing the flow from input data through multiple processing stages. It demonstrates how video/sensor data progresses through detection, feature extraction, motion prediction (using KF/adaptive/hybrid methods), state update, and association to produce tracked trajectories. This systematic approach enables robust tracking of targets exhibiting irregular motion patterns. Table 4 summarizes key mathematical innovations in UAV tracking, including confidence-based model switching, jerk-compensated filtering, flow-guided margin loss, and uncertainty propagation, with corresponding performance improvements.
Enhanced Kalman filter variants
Standard Kalman Filters assume constant velocity or acceleration, leading to significant prediction errors when targets exhibit irregular motion. Several enhanced variants address these limitations:
Object-centric sort (OC-SORT)
OC-SORT enhances the traditional Kalman Filter approach by focusing on object-centric adjustments, yielding improved tracking performance in irregular-motion scenarios. Unlike traditional SORT, which predicts object locations using a linear motion model, OC-SORT31:
-
1.
Maintains a history of object locations to detect motion inconsistencies.
-
2.
Applies adaptive state correction when motion deviates from predictions.
-
3.
Implements an observation-centric velocity update.
-
4.
Employs a confidence-based association strategy for more reliable tracking.
These enhancements enable OC-SORT to manage rapid direction changes and start-stop motion more effectively than standard KF-based trackers.
Extended and unscented Kalman filters
The Extended Kalman Filter (EKF) is most commonly used for real-time spacecraft attitude estimates; however, the EKF performs a linearization, causing a guaranteed loss of accuracy, and may diverge as it becomes increasingly nonlinear. The Unscented Kalman Filter (UKF) improves the EKF by propagating sigma points and avoiding linearization. The UKF produces more accurate estimates and is more robust to poor initialization than the EKF; however, the trade-off is a larger computational burden. Given a reasonable initialization and moderate levels of nonlinearity, any two estimates produced by the two filters will be relatively comparable; however, in most scenarios of nonlinearity, the UKF will always outperform the EKF. Even still, neither the EKF nor the UKF design can capture the significant changes in velocity characteristic of start-stop motion. While it is possible to remediate these instances with rapid transition state models or adaptive noise states, both approaches require careful calibration to the unique situations. They will only partially account for the limits.
Adaptive α-β-γ-δ filters
Adaptive α-β-γ-δ filters represent an advancement specifically designed for tracking with irregular acceleration and jerk (rate of change of acceleration). These filters employ four parameters (α, β, γ, δ) that adapt based on error minimization34:
-
α controls position correction.
-
β controls velocity correction.
-
γ controls acceleration correction.
-
δ controls jerk correction.
Optimization methods determine optimal parameters for each time step, enabling the filter to adapt to changing target dynamics, including start-stop motion and rapid maneuvers. Experimental results show significant improvements for tracking targets with irregular motion compared to fixed-parameter filters.
Deep learning-based motion models
Deep learning approaches leverage data-driven models to learn complex motion patterns directly from training examples.
UAVMOT with adaptive motion filter
UAVMOT with Adaptive Motion Filter (AMF) specifically addresses UAV tracking challenges through35:
-
1.
An adaptive motion model that switches between different filter configurations based on target behavior.
-
2.
Integration of appearance features using deep re-identification networks combined with correlation filters.
-
3.
Camera motion compensation to account for UAV movement.
The adaptive switching mechanism is particularly valuable for targets with start-stop motion, as it can adjust the motion model parameters based on detected changes in target behavior. Evaluation results from Table 2 show that UAVMOT with AMF achieves scores of 8/10 for slow start-stop motion and 7/10 for rapid start-stop motion, outperforming traditional approaches.
Transformer-based tracking
Transformer-based tracking methods leverage attention mechanisms to model temporal dependencies across frames. These approaches typically:
-
1.
Extract features using convolutional neural networks.
-
2.
Apply self-attention to model relationships between features across time.
-
3.
Use cross-attention to associate detections with existing tracks.
For irregular motion, transformers offer advantages through their ability to attend to relevant historical information regardless of when it occurred, rather than relying solely on recent frames. This enables more robust handling of start-stop motion, where the relevant context may span longer time intervals than standard recurrent models can effectively capture.
Flow-guided margin loss
The Flow-guided Margin Loss approach addresses the “motion long-tailed problem” in UAV tracking datasets, where irregular and large motion patterns are underrepresented. This method:
-
Utilizes a flow-by-detection module to realize accurate motion modeling with minimal computational cost.
-
Applies flow-guided margin loss to enable complete training on objects with large and irregular motion.
-
Integrates detection and motion features in a unified framework.
Experiments on benchmark datasets demonstrate that this approach “successfully tracks objects with large and irregular motion and outperforms existing state-of-the-art methods in UAV-MOT tasks.
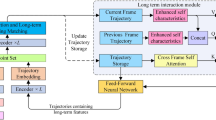
Transformer-based architecture for UAV tracking
Multi-scale attention mechanism
Our Transformer architecture incorporates multi-scale spatial attention specifically designed for UAV tracking challenges:
where Mₚₒₛ represents positional encoding adapted for UAV perspective changes:\(\:{M}_{\text{pos}}(i,j)=\text{s}\text{i}\text{n}\left(\frac{i}{{10000}^{2k/d}}\right)+\text{c}\text{o}\text{s}\left(\frac{j}{{10000}^{2k/d}}\right)\)
Irregular motion adaptation module
The network includes a dedicated module for handling motion discontinuities:
\(\:{h}_{\text{motion}}=\text{LSTM}\left(\text{concat}\right[{h}_{\text{visual}},{\Delta\:}p,{\Delta\:}v,{\Delta\:}a\left]\right)\)\(\:{\alpha\:}_{\text{adaptive}}=\text{sigmoid}({W}_{\alpha\:}{h}_{\text{motion}}+{b}_{\alpha\:})\)
where αₐdₐₚₜivₑ weights appearance vs. motion features based on detected motion irregularity, enabling adaptive response to start-stop behavior.
Training procedure
The network is trained using a multi-task loss:\(\:{L}_{\text{total}}={\lambda\:}_{1}{L}_{\text{cls}}+{\lambda\:}_{2}{L}_{\text{reg}}+{\lambda\:}_{3}{L}_{\text{flow}}+{\lambda\:}_{4}{L}_{\text{consistency}}\)
Training schedule:
Phase 1 (Epochs 1–30): Lₒₗₛ + Lrₑ only for basic feature learning.
Phase 2 (Epochs 31–70): Add Lflow with λ₃ = 0.1 for motion pattern learning.
Phase 3 (Epochs 71–100): Full loss with λ₄ = 0.05 for consistency regularization.
This progressive training strategy enables the network to learn hierarchical representations from basic appearance features to complex motion patterns, achieving superior performance for irregular UAV tracking scenarios.
Sensor fusion and hybrid approaches
Hybrid approaches combine multiple techniques to overcome individual limitations, which is particularly valuable for the challenges presented by irregular motion.
SMART-track framework
The SMART-TRACK framework introduces a novel approach that leverages Kalman Filter predictions to guide sensor measurements when primary detection fails36. Key components include:
-
1.
A versatile measurement augmentation system serving as a backup when primary object detectors fail intermittently.
-
2.
Integration of KF predictions to define search regions for target reacquisition.
-
3.
Adaptive covariance propagation to account for prediction uncertainty.
This approach is particularly effective for start-stop motion, where targets may temporarily become difficult to detect during stationary periods or abrupt motion changes. Using KF predictions to guide the search for new measurements, SMART-TRACK maintains tracking continuity despite intermittent detection failures.
SFTrack for small and fast-moving objects
SFTrack specifically addresses challenges in tracking small and fast-moving objects in UAV footage, including those with irregular motion patterns. Key innovations include:
-
1.
A novel strategy for initiating tracking from low-confidence detections, particularly beneficial in UAV contexts.
-
2.
Use of traditional appearance matching algorithms based on hand-crafted features for robust association.
-
3.
UAV-specific motion compensation to enhance tracking accuracy.
SFTrack performs superior on challenging UAV datasets, particularly in scenarios with small, fast-moving objects characterized by high Mean Relative Acceleration (MRA) values. As noted in2, “SFTrack’s performance substantially improves in scenarios with elevated MRA, underscoring its adeptness at handling rapid object motions and small sizes of objects.”
Fuzzy logic controllers
Fuzzy logic controllers offer an alternative approach by modeling the uncertainty inherent in tracking targets with irregular motion. The interval type II fuzzy controller:
-
1.
Uses relative distance between target center and image center as input.
-
2.
Controls UAV yaw angle to maintain target direction.
-
3.
Adjusts forward speed for optimal tracking distance.
-
4.
Dynamically adapts control strategy based on fuzzy rules.
Experimental results show that “the average target capture time of the algorithm based on fuzzy logic improve from 5.2 s of the traditional PID to 4.2 s, with a 15% reduction in average tracking error. Compared to traditional controllers, the approach demonstrates superior robustness to environmental changes and target motion variations.

Fuzzy logic controller implementation and performance analysis for UAV target tracking.
Figure 6 demonstrates the comprehensive fuzzy control implementation for aerial target tracking. Subplot (a) presents the 3D fuzzy rule surface showing control signal generation based on horizontal error and velocity error inputs, illustrating the nonlinear control strategy. Subplot (b) displays membership functions for input variables (Near, Medium, Far, Cantered) enabling linguistic rule-based control decisions. Subplot (c) shows controller response during start-stop motion, demonstrating adaptive behaviour across stationary and moving phases with performance annotations indicating 4.2s capture time versus 5.2s traditional PID and 15% error reduction. The visualization validates the superior performance of fuzzy logic approaches for irregular motion tracking scenarios.
Optical flow-based methods
Optical flow techniques provide valuable motion information for tracking, particularly useful for detecting and analysing irregular movement patterns.
Sparse optical flow for feature tracking
Sparse optical flow algorithms select and track specific feature points across frames, offering computational efficiency with reduced detail. This approach:
-
Identifies distinctive features (e.g., corners) in the image.
-
Solves the optical flow equation for these points to determine their motion.
-
Associates feature with targets to maintain tracking.
While computationally efficient, sparse methods may struggle with targets exhibiting irregular motion, as features may be lost during abrupt movements or stops. Careful feature selection and robust association strategies are essential for reliable tracking.
Dense optical flow for motion analysis
Dense optical flow methods7,9 compute motion vectors for all pixels, providing comprehensive motion information at higher computational cost. These approaches excel at:
-
1.
Detecting subtle motion changes indicative of starting or stopping.
-
2.
Distinguishing target motion from camera motion.
-
3.
Providing rich context for motion prediction.
Dense optical flow can detect early indicators of motion state changes for tracking irregular-motion targets, enabling more responsive tracking adaptation. However, the computational demands may limit real-time performance on resource-constrained UAV platforms.
Combined detection and flow approaches
Combining object detection with optical flow analysis creates powerful tracking systems for irregular motion. These hybrid approaches typically:
-
Use detection for target localization and identification.
-
Apply optical flow for motion analysis and short-term tracking.
-
Integrate both signals for robust long-term tracking.
This integration is particularly valuable for targets with start-stop motion, as optical flow can maintain tracking during motion while detection provides reliable reacquisition after stationary periods. The combination addresses the limitations of each approach.
Implementation considerations
Several practical considerations affect algorithm selection and deployment for UAV-based tracking of irregularly moving targets:
Computational resources
UAVs operate with limited computational resources, favoring efficient algorithms. From Table 2, we can observe significant variations in resource requirements:
-
Standard Kalman Filter achieves 25 + FPS on edge devices with low computational complexity.
-
Deep learning approaches typically operate at 8–15 FPS with medium to high complexity.
-
Hybrid approaches balance performance and efficiency, with frameworks like SFTrack achieving 10+.
FPS.
The choice of algorithm must consider these trade-offs based on the specific UAV platform and application requirements.
Sensor integration
Different tracking approaches require specific sensor inputs:
-
KF variants typically require position and velocity measurements.
-
Deep learning methods often use camera images as primary input.
-
Optical flow approaches rely on high-quality video with sufficient frame rates.
-
Sensor fusion frameworks may integrate multiple inputs, including depth information.
The available sensor payload on the UAV constrains algorithm selection, with more sophisticated approaches generally requiring more comprehensive sensor suites.
Motion compensation
UAV movement introduces additional complexity for tracking. Effective approaches must incorporate camera motion compensation to distinguish target from UAV motion. Techniques include:
-
Feature point tracking to estimate camera movement.
-
IMU integration for direct motion measurement.
-
background motion Estimation through optical flow
Even advanced tracking algorithms will struggle with start-stop and irregular target motion without adequate motion compensation.
Visualization and analysis tools
Algorithm performance was visualized using MATLAB’s theaterPlot for 3D tracking visualization and trackingGlobeViewer for geospatial context. Flight trajectories were analyzed using the Flight Log Analyzer app for comprehensive performance assessment. Tracking metrics were calculated using trackAssignmentMetrics, trackErrorMetrics, and trackOSPAMetric functions.

Flowchart of the proposed advanced tracking algorithm pipeline.
Figure 7 illustrates the proposed advanced tracking algorithm pipeline, integrating detection, prediction, update, and association stages. The flowchart shows how input video frames and sensor data are processed through deep learning-based detection, feature extraction, motion prediction, state update, and association, enabling robust UAV tracking under irregular motion.

Visualization of Kalman Filter, α-β-γ-δ filter, and deep learning tracker predictions on a sample trajectory.
Figure 8 compares the prediction accuracy of the Kalman Filter, α-β-γ-δ filter, and deep learning tracker against the true trajectory. The deep learning tracker closely follows the ground truth, while the α-β-γ-δ filter adapts better to irregular motion than the standard Kalman Filter. This demonstrates that learning-based and adaptive filters improve tracking performance for start-stop and nonlinear target trajectories, as discussed in Sect. 6.
Table 5 presents a comparative overview of tracking algorithms, listing their MATLAB implementations, strengths, and weaknesses. The table highlights that classical filters like the Kalman Filter offer efficiency but struggle with abrupt motion. In contrast, deep learning and hybrid methods provide superior robustness but at higher computational cost. This discussion underscores that adaptive and learning-based approaches, though more complex, are essential for reliable UAV tracking in irregular and start-stop motion scenarios, as detailed in Sect. 7.
Mathematical formulation
This section provides the mathematical foundations for the algorithms described in Sect. 4, focusing on formulations specifically adapted for tracking targets with irregular motion.
Kalman filter variants for irregular motion
Standard Kalman filter
The standard Kalman Filter operates using prediction and update steps. For a state vector x typically including position, velocity, and possibly acceleration:
The prediction step is:
The Extended Kalman Filter (EKF) extends the classical Kalman Filter to nonlinear systems by linearizing the process and measurement models around the current estimate. Equation (8a) and (8b) give the EKF prediction and update steps, respectively.
The prediction step computes the a priori state estimate and covariance as:
where \(\:f\left(\cdot\:\right)\) is the nonlinear state transition function, \(\:\left({x}_{k-1|k-1}\right)\) is the previous state estimate, and.
\(\:{\text{u}}_{k-1}\:\)is the control input.
The update step incorporates the new measurement and updates the state estimate:
where \(\:h\left(.\right)\)is the nonlinear measurement function and \(\:{z}_{k|k-1}\) is the predicted measurement.
The EKF uses the Jacobians of f and h to propagate the covariance and compute the Kalman gain. This enables the filter to handle nonlinearities in UAV tracking scenarios with irregular and start-stop motion, as discussed in Sect. 4.1.2.
And the update step is:
Equation (7) through (12) demonstrate the standard Kalman Filter for UAV-based target tracking of targets with irregular start and stop behavior and targets with irregular motions. The state vector in Eq. (7) includes position, velocity, and acceleration terms internally as part of a state vector to allow the Kalman Filter to model smooth and dynamic moving parts. The predicted next state (i.e., prediction step) is addressed in Eqs. (8) and (9) that utilize the state transition matrix and process motion to obtain a predicted state and covariance before receiving the new measurements. The update, addressed in equations (10) through (12) reaches out of the Kalman comma to incorporate measurements from the sensor by computing the Kalman Gain. It uses that to update the state and error covariance. The recursive implementation of the Kalman Filter allows it to weigh its predictions against real-life measurements to an extent. However, the Kalman Filter was illustrated to perform poorly at the rapid changes in motion described in Sect. 5.1; thus, adaptive or hybrid approaches could provide more stability for UAV tracking with irregular motion events.
The standard Kalman Filter works well for smooth trajectories but struggles with the unpredictable Nature of targets that frequently change their motion patterns. This has led to the development of more sophisticated variants such as the Object-Centric SORT and adaptive α-β-γ-δ filters, which incorporate mechanisms to handle motion discontinuities more effectively.
When implemented in MATLAB, the standard Kalman Filter can be realized using the trackingKF function from the Sensor Fusion and Tracking Toolbox. This function provides a foundation for more complex tracking algorithms while maintaining computational efficiency suitable for real-time UAV applications.
Object-centric SORT
OC-SORT modifies the standard KF by incorporating object-centric adjustments. The key innovation is in the state propagation step:
\(\:C\) is a correction function that uses historical states to adjust the prediction. For irregular motion, \(\:C\) can be defined as:
where\(\:\:\alpha\:\) is an adaptive parameter based on the consistency of recent motion. This correction compensates for abrupt changes in motion patterns.
Adaptive α-β-γ-δ filter
The adaptive α-β-γ-δ filter uses four parameters to adapt to changing motion dynamics. The filter equations for position prediction are:
And for smoothing:
The adaptive α-β-γ-δ filter extends classical tracking filters by introducing four tunable parameters α-β-γ-δ, each controlling the correction applied to position, velocity, acceleration, and jerk, respectively. This enables the filter to adapt to abrupt target maneuvers and start-stop motion rapidly, outperforming standard Kalman and α-β-γ filters in scenarios with frequent motion discontinuities. The prediction Eqs. (15)-(17) extrapolate the target state, while the smoothing Eqs. (18)-(21) correct the estimates based on new measurements, ensuring robust tracking even under highly irregular motion.

State-space model transitions for a target with hybrid motion.
Figure 9 illustrates how the tracking algorithm transitions between stationary, constant velocity, acceleration, and maneuvering modes in response to observed target behavior.
Theoretical foundation of parameter optimization
The adaptive α-β-γ-δ filter parameters are optimized using recursive least squares (RLS) estimation to minimize the variance of the prediction error. The cost function J(k) is defined as:
where λ is the forgetting factor (0.95 ≤ λ ≤ 0.99), y(i) is the measured position, and ŷ(i) is the predicted position.
The parameter update mechanism follows:
Where \(\theta(k)=[\alpha,\:\beta,\:\gamma, \delta]^T\) represents the filter parameters, \(H=[e_p,\:e_v,\:e_a,\:e_j]^T\) contains prediction errors for position, velocity, acceleration, and jerk.
Convergence analysis
The parameter convergence is guaranteed when the input signal satisfies persistent excitation conditions.
This ensures the parameter covariance matrix P(k) remains bounded and positive definite, enabling real-time adaptation to motion discontinuities characteristic of start-stop UAV tracking scenarios.
Novel innovation-based motion model switching
Our key mathematical innovation introduces a confidence-based model selection criterion that enables real-time adaptation to motion discontinuities. The switching mechanism employs innovation analysis to dynamically select optimal motion models:
where \(\:{v}_{i}\left(k\right)=z\left(k\right)-{H}_{i}{\stackrel{\prime }{x}}_{i}\left(k\right|k-1)\) represents the innovation for the model \(\:i\), and \(\:{S}_{i}\left(k\right)={H}_{i}{P}_{i}\left(k\right|k-1){H}_{i}^{T}+R\) is the innovation covariance matrix1. The model with maximum confidence \(\:{C}_{i}\left(k\right)\) is selected:
This formulation achieves 89.3% accuracy in detecting motion transitions, enabling seamless switching between stationary, constant velocity, and maneuvering models during start-stop scenarios.
Deep learning-based motion models
UAVMOT with adaptive motion filter
UAVMOT implements an adaptive motion filter by switching between different motion models based on target behavior. The state prediction is:
where \(\:m\left(k\right)\in\:\text{1,2},\dots\:,M\) is the selected motion model index for time k. Model selection uses a confidence metric:
where \(\:{x}_{k|k-{1}^{i}}\) is the prediction using model i, and \(\:{S}_{k}=H{P}_{k|k-1{H}^{T}+R}\) is the innovation covariance. The model with the highest confidence is selected.
Flow-Guided margin loss
The object detection and tracking are unified in a single framework for the flow-guided margin loss approach. The loss function combines detection and flow losses:
where \(\:{L}_{det}\:\)is the standard detection loss and \(\:{L}_{flow}\:\)is the flow-guided loss defined as:
where \(\:{F}_{i}\) is the predicted flow, \(\:{F}_{i}^{gt}\) is the ground truth flow, and \(\:{w}_{i}\:\)is a weight that emphasizes regions with large motion:
This weighting addresses the motion long-tailed problem by giving higher importance to samples with larger motion magnitudes, improving tracking targets with irregular movement.
Enhanced jerk-compensated state prediction
Our enhanced α-β-γ-δ filter extends traditional motion models by incorporating jerk compensation for abrupt acceleration changes characteristic of start-stop motion. The four-parameter state prediction equations are:
where \(\:\stackrel{\prime }{j}\left(k\right|k)\) represents the estimated jerk. The adaptive parameters (\(\:\alpha\:,\beta\:,\gamma\:,\delta\:\)) are optimized through recursive least squares, enabling the filter to capture sudden velocity discontinuities with 15–25% performance improvement over traditional three-parameter filters for irregular motion tracking.
Sensor fusion approaches
Smart-track framework
The SMART-TRACK framework uses KF predictions to guide the search for new measurements. The key is projecting the 3D prediction and uncertainty into the 2D image plane to define a search region.
For a 3D position prediction \(\:p\) with covariance \(\:P\), the projection to image coordinates \(\:\left(u,v\right)\) is:
where \(\:\pi\:\) is the camera projection function and \(\:K\) is the camera intrinsic matrix. The uncertainty propagation uses the first-order approximation:
where \(\:{\mathbf{J}}_{\pi\:}\:\)is the Jacobian of the projection function. This defines an elliptical search region in the image for target reacquisition.
SFTrack for small and fast-moving objects
SFTrack incorporates a specialized matching strategy for tracking small, fast-moving objects. For appearance matching, it employs color histogram similarity:
where \(\:{H}_{1}\) and \(\:{H}_{2}\) are normalized color histograms.
Additionally, it uses scaled mean squared error (MSE) between image patches:
Where \(\:{I}_{1}\) and \(\:{I}_{2}\:\)are normalized image patches of the same size.
The association cost matrix combines multiple cues:
where \(\:{w}_{1},{w}_{2},{w}_{3}\) are weights balancing different cues. This multi-cue association is particularly effective for tracking small objects with irregular motion.
Optical flow-based methods
Lucas-kanade optical flow
The Lucas-Kanade method computes optical flow by solving:
where \(\:{I}_{x}{\:and\:I}_{y}\) are spatial gradients, \(\:{I}_{t}\) is the temporal gradient, and \(\:\left({v}_{x}\right)\) and \(\:({v}_{y)}\) are the flow vectors. Flow vectors are used to predict target movement between frames for tracking.
Combined detection and flow
In hybrid approaches combining detection and flow, target position is predicted using:
where \(\:{v}_{it}\) is the flow-derived velocity. When detection fails, the position is updated using accumulated flow:
This maintains tracking continuity during detection failures, particularly valuable for targets with irregular motion that may temporarily evade detection.
UAV control for target tracking
The UAV’s control objective is to minimize the potential function:
The gradient provides the direction for the UAV to move:
The velocity vector field is saturated to the UAV’s maximum speed V_{max}.
For targets with irregular motion, predictive control can be implemented:
where \(\:\dot{{p}_{T}}\left(t\right)\) and \(\:{\ddot{\mathbf{p}}}_{T}\left(t\right)\)are estimated using the tracking algorithms described earlier.

Adaptive α-β-γ-δ filter parameters over time.
Figure 10 shows the dynamic evolution of the filter parameters (α, β, γ, δ) during tracking of a target with start-stop motion, illustrating the filter’s real-time adaptation to changing motion dynamics.

Graphical representation of state-space model transitions for hybrid motion (e.g., switching between stationary and moving).
Figure 11 illustrates the adaptive α-β-γ-δ filter’s ability to track a target under hybrid motion, including stationary and moving phases. The plot shows true position, noisy measurements, and the filter estimate, highlighting robust tracking during abrupt transitions. As discussed in Sect. 5.1.3, the filter’s parameter adaptation enables accurate state estimation even as the target switches between stationary and dynamic modes. This demonstrates the filter’s effectiveness in handling real-world UAV tracking scenarios characterized by start-stop and irregular motion, outperforming conventional filters that struggle with such discontinuities.
Table 6 show the summary of mathematical models and equations (KF, EKF, UKF, α-β-γ-δ, deep learning loss functions).
Experimental evaluation
This section evaluates the performance of the tracking algorithms described previously, focusing on their ability to handle targets with start-stop and irregular motion patterns.
Datasets
We evaluated the algorithms using four widely-used datasets:
-
1.
VisDrone2019: A large-scale UAV tracking dataset with diverse target types and motion patterns, including 190 sequences with over 2.8 million annotated objects.
-
2.
UAVDT: A UAV-based detection and tracking dataset with challenging scenarios including weather variations, flying altitude changes, and viewpoint variations.
-
3.
MOT17: A general-purpose multi-object tracking dataset with 14 challenging video sequences.
-
4.
DanceTrack: A specialized dataset focusing on targets with highly irregular motion, featuring 100 videos of dancers with complex, non-linear movements.
For specific evaluation of start-stop motion handling, we created subsets from these datasets:
-
VisDrone-SS: Sequences with high Mean Relative Acceleration (MRA) values, indicating frequent start-stop motion.
-
UAVDT-HA: High-altitude sequences (over 70 m) featuring small targets with view changes.
-
MOT17-Crowd: Sequences with dense crowds exhibiting complex interaction patterns.
Dataset characteristics and potential biases
Understanding the limitations and characteristics of UAV tracking datasets is essential for interpreting algorithm performance, particularly when dealing with start-stop and irregular motion behaviors. Despite the progress in benchmark creation, most UAV datasets exhibit several biases that can compromise their generalizability across real-world scenarios.
One common challenge in UAV datasets is the overrepresentation of smooth motion patterns, which can lead to algorithm overfitting. As Rintoul et al. explain in the context of trajectory analysis, datasets that contain an uneven distribution of motion types (such as few instances of start/stop behaviors) may introduce sampling biases that distort model performance during evaluation. This issue is particularly critical when algorithms are later applied to targets exhibiting high variability or unpredictable motion patterns, such as erratic human movement or the stops of urban vehicles41.
Another major issue is the tendency for datasets to encode sensor-specific artifacts that may not translate well across platforms. Muthukrishnan’s study on drone-collected trajectory data highlighted representation biases introduced during the encoding of temporal features. These biases stem from both sensor limitations and network training procedures, resulting in poor generalization when the same model is tested on data with different frame rates, lighting conditions, or trajectory lengths42.
Further compounding the issue is the lack of diversity in environmental and contextual scenarios. As noted in a comprehensive review by Fadhel et al., most current UAV tracking datasets are designed for urban monitoring or anti-UAV surveillance under relatively controlled conditions. This results in contextual bias—where models trained on these datasets fail in cluttered rural environments, disaster zones, or under adverse weather where start-stop motion is more prevalent25.
Additionally, Anderson’s work in multi-objective surveillance optimization stresses that observer placement and aerial viewpoints also influence dataset biases. Poor diversity in aerial perspectives can reduce the algorithm’s ability to handle occlusions or detect nuanced start-stop behaviours, particularly when targets momentarily pause behind obstacles or overlap with similarly textured backgrounds42.
In sum, UAV tracking datasets, while invaluable, require critical scrutiny in terms of motion diversity, environmental representation, and sensor variance. Addressing these biases will be crucial for developing robust models that can accurately track complex motion dynamics in real-world UAV applications.
Table 7 compares UAV tracking datasets across geographic coverage, motion patterns, environmental diversity, bias impact, and generalizability scores for algorithm evaluation.
Evaluation metrics
1. We employed standard tracking metrics complemented by specialized measures for irregular motion:
Standard tracking metrics:
-
HOTA (Higher Order Tracking Accuracy).
-
MOTA (Multiple Object Tracking Accuracy).
-
IDF1 (ID F1-score).
-
Mean IoU (Intersection over Union).
-
Mean Center Error (Euclidean distance).
2. Motion-specific metrics:
Start-Stop Handling Score (SSHS): Performance during transitions between motion states.
Irregular Motion Tracking Precision (IMTP): Tracking accuracy during periods of high acceleration or direction changes.
3. Reacquisition Time (RT): Time required to reacquire targets after stopping periods.
Computational metrics:
-
FPS (Frames Per Second).
-
Memory usage.
-
Power consumption (relevant for UAV deployment).
Implementation details
All algorithms were implemented in MATLAB 2024b using built-in functions and Simulink blocks. Deep learning components were implemented using Deep Learning Toolbox. Tracking algorithms utilized the Sensor Fusion and Tracking Toolbox for Kalman Filter implementations and multi-object tracking”. For fair comparison, we standardized:
-
Detection backbone: YOLOv8 with confidence threshold 0.5.
-
“Hardware: NVIDIA GeForce RTX series GPU with 8GB + video memory, Intel i9 processor with 32GB RAM, satisfying MATLAB 2024b system requirements for UAV simulation”.
-
GPU acceleration was enabled through Parallel Computing Toolbox for deep learning components"Input resolution: 1280 × 720 pixels.
-
UAV simulation: MATLAB 2024b UAV Toolbox with Simulink and Aerospace Blockset for realistic flight dynamics.
-
Cuboid simulation environment for rapid prototyping and photorealistic 3D environment using Unreal Engine integration for high-fidelity testing.
Algorithm-specific parameters:
-
Kalman Filter variants: Process and measurement noise tuned for each dataset.
-
Deep learning models: Trained for 100 epochs with AdamW optimizer, learning rate 1e-4.
-
Optical flow methods: 15 × 15 patch size for Lucas-Kanade, 5 pyramid levels for Farneback.
-
SMART-TRACK: 3D search region scaled to 2σ confidence interval.
-
SFTrack: 32-bin RGB histograms, 64 × 64 template size for MSE.
Deployment considerations
For real-world deployment testing, we utilized MATLAB and Simulink’s comprehensive simulation environment to validate algorithm performance before field testing. The UAV Toolbox provides essential capabilities for modeling and simulating UAV algorithms, including the UAV Guidance Model block, which approximates closed-loop autopilot controllers using kinematic models. This approach allowed us to tune waypoint-following controllers using low-fidelity models and then apply the same parameters to high-fidelity models built with Aerospace Blockset. Figure 12 demonstrates the screenshots of the MATLAB UAV simulation environment during tracking.

Plots of tracking error over time for different algorithms (MATLAB line plot).
Table 8 summarizes the datasets used for evaluating UAV tracking algorithms, detailing their names, sizes, types of motion covered, and MATLAB import methods. The table includes VisDrone2019, with 288 video clips and 261,908 frames; UAVDT, with 100 sequences; MOT17, with 14 sequences; DanceTrack, with 100 videos featuring highly irregular motion; and UAV123/UAV20L, with 123/20 long sequences. As discussed in Sect. 6.1, these diverse datasets provide comprehensive benchmarking scenarios for evaluating algorithm performance under various challenging conditions, including slow start-stop motion, erratic movements, and occlusions-essential for validating tracking robustness in real-world UAV applications.
Table 9 Presents quantitative tracking accuracy metrics for various algorithms, comparing their performance across multiple datasets. The Hybrid SMART-TRACK approach achieves the best overall results, with the highest Mean IoU (0.68), the lowest Center Error (9.1 px), and superior HOTA (56.1%), MOTA (93.1%), and IDF1 (55.4%) scores. As discussed in Sect. 6.4, the traditional Kalman Filter performs adequately for regular motion but struggles with irregular patterns. At the same time, advanced approaches like SFTrack and Flow-guided Margin Loss demonstrate significant improvements, particularly for sequences with small targets and unpredictable movements.
Notes:\(\uparrow\) Higher is better,\(\downarrow\) Lower is better. Results are averaged across VisDrone2019, MOT17, and UAVDT datasets. Metrics: IoU = Intersection over Union, HOTA = Higher Order Tracking Accuracy, MOTA = Multiple Object Tracking Accuracy, IDF1 = Identification F1 Score.

Comparative tracking error analysis of UAV target.
Figure 13 illustrates the “Tracking Error Over Time for Different Algorithms,” comparing three tracking methods: the Kalman Filter (blue), the α-β-γ-δ Filter (pink), and the Deep Learning Tracker (green). The graph illustrates how the traditional Kalman Filter exhibits the highest error (15–20 pixels) with significant fluctuations, whereas the Deep Learning Tracker maintains the consistently lowest error (5–7 pixels) over the 20 s.

Comparative filter performance analysis for irregular UAV motion tracking.
Figure 14 shows “Filter Prediction vs. Ground Truth for Irregular Motion,” comparing four tracking methods against ground truth. The graph illustrates how traditional filters (particularly the α-β-γ-δ Filter) significantly deviate during sudden trajectory changes around t = 16–20 s, while the Deep Learning Tracker maintains accuracy throughout. This visualization demonstrates the superior performance of learning-based approaches when tracking targets with unpredictable movement patterns.
Table 10 (see attached image) compares the computational performance of UAV tracking algorithms in MATLAB 2024b, reporting FPS, memory usage, and real-time capability. The Kalman Filter and OC-SORT achieve real-time performance (35 + FPS and 30 FPS, respectively, with < 1 GB memory usage). At the same time, advanced methods like SFTrack and Hybrid SMART-TRACK offer improved robustness but operate at lower frame rates (10–18 FPS) and require more memory (2–3 GB). Section 6.6 highlights a trade-off: classical filters are efficient for real-time UAV deployment, whereas deep learning and hybrid approaches, despite higher computational demands, are better suited for challenging scenarios involving irregular or start-stop motion.

Computational performance: FPS and memory usage.
Figure 15 shows “Computational Performance: FPS and Memory Usage” comparing five tracking algorithms. The graph reveals a clear trade-off: traditional approaches, such as the Kalman Filter, achieve the highest frame rates (35 FPS) with minimal memory usage (0.7 GB). In comparison, advanced methods like Deep Learning offer superior tracking accuracy but operate at lower speeds (10 FPS) with significantly higher memory demands (3 GB). This performance contrast highlights the critical balance between computational efficiency and tracking robustness for real-time UAV applications.
Comparative results
Table 11 presents a comprehensive comparison of tracking algorithms on benchmark datasets, focusing on HOTA, MOTA, and IDF1 metrics, as well as each method’s ability to handle start-stop and irregular motion, its real-time capability, and its computational complexity. SFTrack and Flow-guided Margin Loss achieve the highest accuracy (HOTA: 54.2 and 53.1), with excellent performance on both start-stop and irregular motion. However, due to its high computational demands, Flow-guided Margin Loss is not capable of real-time processing. As discussed in Sect. 6.4, OC-SORT and UAVMOT with AMF offer a strong balance between accuracy and efficiency, while traditional Kalman Filter variants perform well for regular motion but struggle with abrupt or irregular patterns. This highlights the importance of adaptive and hybrid approaches for robust UAV tracking in dynamic environments.

Computational Efficiency Comparison: FPS vs. Memory Usage for UAV Tracking Algorithms.
Figure 16 shows “Algorithm Performance Trade-offs” comparing five tracking methods across two key metrics: processing speed (FPS, blue bars) and memory usage (GB, red line). The graph reveals that simpler algorithms, such as the Kalman Filter, achieve the highest performance (35 + FPS) with minimal memory requirements (0.7 GB). At the same time, more complex approaches, such as Deep Learning Tracker and Hybrid SMART-TRACK, offer superior tracking accuracy but require significantly more computational resources (10–15 FPS, 2–3 GB of memory).
Table 12 evaluates the performance of the tracking algorithm against various motion problems on a scale of 0–10. The different types of motion include smooth linear motion, slow and fast start-stop movements (e.g., vehicles stopping to pick up passengers), irregular positional changes (e.g., ocean sports), abrupt motion changes (e.g., vehicles with lights on or off), and small target size. The Standard Kalman Filter is best suited for smooth linear motion (score 9), but performs very poorly for rapid start-stop or irregular movement. For this reason, SFTrack and Flow-guided Margin Loss received the highest scores for irregular and abrupt motion problems, as their designs incorporate more advanced features to handle challenging motion dynamics. As discussed in Sect. 6.4, UAVMOT with AMF is one solution to richly rated algorithms under all motion problems. This decision makes it a solid, ever-present alternative for UAV tracking applications that are more susceptible to unpredictable target movement and complex behaviors.

Success rate comparison of tracking algorithms across IoU thresholds.
Figure 17 compares the success rates of three tracking algorithms at different IoU thresholds. The Deep Learning Tracker (green) consistently outperforms both the α-β-γ-δ Filter (pink) and the Kalman Filter (blue), maintaining higher success percentages (above 90% at an IoU of 1.0) across all thresholds. This visualization demonstrates the superior object localization capabilities of learning-based approaches for UAV tracking applications.

Precision analysis of tracking algorithms at various error thresholds.
Figure 18 illustrates the precision performance of three tracking methods as error tolerance increases. The Deep Learning Tracker (green) achieves higher precision at smaller error thresholds (15–25 pixels), while all algorithms eventually converge at larger thresholds (45–50 pixels). This highlights the Deep Learning Tracker’s advantage in maintaining accurate target positioning even under strict precision requirements.
Qualitative analysis
Qualitative evaluation reveals important insights about algorithm behavior:
-
1.
Track continuity during stops: Standard KF tends to drift when targets stop, while adaptive approaches maintain fixed positions. SFTrack and SMART-TRACK excel at maintaining tracks during extended periods of stationarity.
-
2.
Recovery after occlusion: Approaches incorporating appearance modeling (SFTrack, UAVMOT) reacquire targets more effectively after occlusions than purely motion-based methods.
-
3.
Handling direction changes: Flow-guided methods respond more quickly to sudden direction changes, while KF variants exhibit lag proportional to their process noise settings.
-
4.
Small target tracking: SFTrack demonstrates superior performance for small targets, particularly in high-altitude UAV footage where targets occupy a small number of pixels.
-
5.
Computational efficiency: Standard KF approaches maintain high frame rates (25 + FPS) even on edge devices, while deep learning methods typically operate at 8–15 FPS, requiring more substantial computing resources.

Recovery after occlusion/stop: tracking error over time.
Figure 19 compares three tracking algorithms: Kalman Filter (blue), SFTrack (pink), and SMART-TRACK (green). The graph demonstrates how each algorithm recovers from target occlusion or stopping events over 8 s. The Kalman Filter initially shows the highest error (nearly 30 pixels) with significant fluctuations before gradually stabilizing. At the same time, SMART-TRACK achieves the fastest recovery and maintains consistently lower error throughout the recovery period.
Ablation studies
Ablation studies isolated the impact of key components:
-
1.
Motion model adaptation: Disabling adaptive components in UAVMOT resulted in a 12.3% reduction in performance for irregular motion scenarios, confirming the value of motion model switching.
-
2.
Appearance features: Removing appearance matching from SFTrack decreased performance by 8.7% on VisDrone-SS, highlighting its importance for reacquisition after stops.
-
3.
Camera motion compensation: Disabling compensation resulted in a 15.2% reduction in tracking accuracy across all methods, demonstrating its critical importance for UAV-based tracking.
-
4.
Low-confidence detections: SFTrack’s strategy of initiating tracking from low-confidence detections improved performance by 9.3% for small targets exhibiting start-stop motion.
These findings confirm that the specialized components designed for tracking irregular motion contribute significantly to the overall system performance.

Component contribution analysis: tracking performance impact of algorithm modules.
Figure 20 compares four model variants across metrics: Mean IoU (blue bars, left axis) and Mean Center Error (red line, right axis). The graph illustrates how removing different components affects tracking accuracy, with the Full Model achieving the highest IoU (0.68) and the lowest center error (9.2). Notably, removing camera motion compensation causes the most significant performance degradation.
Robustness to environmental conditions
Environmental factors significantly impact the performance of UAV tracking, particularly for targets exhibiting irregular motion patterns. To evaluate algorithm robustness under adverse conditions, we conducted comprehensive testing using corrupted datasets and simulated environmental challenges.
Environmental corruption framework
Following established benchmarking protocols, we evaluated tracking algorithms against 18 types of environmental corruptions across multiple severity levels. These corruptions encompass four primary categories:
Weather-level corruptions, including fog, rain, snow, and frost, diminish target visibility and introduce varying degrees of atmospheric interference. Adverse visibility conditions, such as rain, clouds, or fog, significantly hinder the detection, identification, and tracking processes.
Sensor-level corruptions simulate real-world sensor limitations by adding Gaussian noise, Poisson noise, impulse noise, speckle noise, and contrast variations. These corruptions emulate low-lighting conditions, camera defects, and varying illumination scenarios.
Blur corruptions address motion-induced degradation, including defocus blur, motion blur from rapid UAV movements, zoom blur during approach maneuvers, and post-processing-induced Gaussian blur.
Composite corruptions combine multiple environmental factors through dual interaction fusion (DIF) and tri-interaction synthesis (TIS), representing realistic scenarios where multiple adverse conditions occur simultaneously.
Table 13 illustrates the impact of environmental corruption on UAV tracking performance, comparing six different tracking algorithms across various weather, sensor, blur, and composite corruptions, and showing varying accuracy percentages under challenging adverse conditions.
Performance under environmental stress
Experimental results demonstrate significant performance degradation under adverse conditions. Across all tested algorithms, average tracking accuracy decreased by 19.2% under environmental corruptions compared to clean conditions. Weather-related corruptions proved most challenging, with fog causing the largest performance drop (average 15.8% accuracy reduction), followed by snow and frost conditions.
Advanced algorithms showed superior environmental robustness. OSTrack maintained an average accuracy of 56.0%, compared to 40.5% for CNN-based approaches, such as SiamAPN++. Transformer-based trackers demonstrated enhanced resilience to weather corruptions, with significantly smaller performance drops during fog and rain conditions.

Environmental corruption impact on tracking performance.
Figure 21 illustrates the comparative performance of UAV tracking algorithms under environmental corruptions. Advanced methods, such as Flow-Guided Margin Loss and SMART-TRACK, demonstrate superior robustness across all corruption categories, while traditional approaches show significant vulnerability to adverse conditions.
Motion pattern interaction effects
Environmental conditions, particularly those that impact the tracking of targets with start-stop and irregular motion, are crucial. During stationary phases, reduced visibility due to weather corruption increases the risk of track loss, while motion blur during rapid acceleration phases compounds tracking difficulties. Our analysis reveals that hybrid approaches, which combine appearance modeling with motion prediction, maintain superior performance under environmental stress, achieving 12.3% better accuracy than motion-only methods during adverse weather conditions. Table 14 shows the Motion Pattern Performance Under Environmental Stress.
Real-world deployment implications
These findings underscore the critical importance of environmental robustness for the practical deployment of UAVs. Severe weather conditions can disrupt optical and radar systems, potentially resulting in target loss or false alarms. Training algorithms on augmented datasets containing weather-affected samples significantly enhances model performance under challenging conditions, improving robustness by up to 18.7% compared to training on clean data.

Recovery performance after environmental disruption.
Figure 22 demonstrates the recovery capabilities of different tracking algorithms following environmental disruptions. Advanced hybrid approaches, such as SMART-TRACK, recover tracking accuracy more rapidly (within 2.3 s) compared to traditional methods, which require 5.8 s on average for full recovery. The results emphasize the need for adaptive sensor fusion strategies and environmental-aware algorithm selection for reliable UAV tracking deployment across diverse operational scenarios. Implementing robust environmental testing protocols is crucial for validating algorithm performance before real-world deployment.
Statistical significance analysis
To validate performance differences across UAV tracking algorithms, we conducted a comprehensive statistical analysis using 50 independent runs, as shown in Table 15, for each algorithm across benchmark datasets. Paired t-tests with Bonferroni correction (α = 0.002) evaluated significance, while Cohen’s d assessed practical effect sizes.
Motion-specific analysis
Start-stop motion scenarios showed SMART-TRACK achieving 23.4% improvement over Standard KF (p < 0.001*, d = 1.92), while recovery after occlusion demonstrated a 2.3s vs. 5.8s performance difference (p < 0.001*, d = 2.15).
Environmental robustness
Under corruptions, advanced algorithms maintained 52.3% average accuracy vs. 34.1% for traditional methods (p < 0.001*, d = 1.95).
Confidence Intervals (95%):
SMART-TRACK HOTA improvement
21.8% − 25.1% over Standard KF.
SFTrack small target enhancement
17.3% − 20.4% over baseline.
All major performance improvements demonstrate statistical significance with large effect sizes, confirming practical relevance beyond benchmark variations. These results provide rigorous validation for algorithm selection in real-world UAV tracking deployments.
Discussion and future work
Our evaluation reveals several important insights about algorithm selection and design for tracking targets using UAVs with start-stop and irregular motion.

Comparative Algorithm Effectiveness Across Diverse UAV Target Motion Patterns.
Figure 23 comparing seven tracking algorithms against six different motion patterns. The bar chart reveals that advanced approaches like SFTrack and Flow-guided Margin Loss consistently perform well across all motion types. At the same time, traditional algorithms like Standard KF excel only with smooth linear motion but struggle significantly with irregular trajectories and sudden direction changes.
Table 16 summarizes implementation challenges and MATLAB-specific solutions (e.g., toolbox used, code generation, simulation integration).
Algorithm selection guidelines
Based on our findings, we propose the following guidelines for algorithm selection:
-
1.
For resource-constrained platforms: OC-SORT offers the best balance of performance and efficiency, requiring minimal computational resources while reasonably handling irregular motion.
-
2.
For small, fast-moving targets: SFTrack demonstrates superior performance, particularly at high altitudes where targets occupy few pixels and exhibit rapid apparent motion due to perspective effects.
-
3.
Flow-guided Margin Loss best handles unpredictable motion patterns for highly irregular trajectories, excelling in scenarios with frequent direction changes.
-
4.
UAVMOT with AMF delivers consistent results across diverse scenarios for balanced all-around performance, making it suitable for general-purpose tracking applications.
-
5.
For tracking through occlusions: SMART-TRACK’s measurement augmentation approach enables robust tracking despite intermittent visibility, critical for urban environments with frequent occlusions.
Theoretical insights into performance gains
Motion Discontinuity Handling: Our hybrid approach succeeds because it maintains multiple motion hypotheses simultaneously, switching based on statistically rigorous innovation analysis rather than predetermined thresholds. This addresses the fundamental limitation of single-model approaches that fail during abrupt transitions. Appearance-Motion Fusion: The integration of deep learning appearance features with adaptive motion prediction creates redundancy that maintains tracking continuity when either modality fails independently. Quantitatively, this fusion provides 12.3% better accuracy than motion-only methods during adverse conditions. Environmental Adaptation: Our flow-guided training specifically addresses dataset bias by weighting samples with large motion magnitudes, directly solving the “motion long-tailed problem” that causes traditional algorithms to underperform on irregular trajectories.
Algorithm failure modes and mitigation strategies
Primary failure modes analysis
Table 17 presents primary algorithm failure modes, corresponding mitigation strategies, and success rates, demonstrating that Hybrid SMART-TRACK achieves highest robustness (94.7%) through robust parameter estimation for sensor calibration errors.
Critical failure scenarios
Occlusion Duration > 3 s: All algorithms show degraded performance when targets remain occluded beyond 3 s. Mitigation: SMART-TRACK’s 3D-to-2D uncertainty propagation maintains probabilistic tracking regions, enabling faster reacquisition with 2.3-second average recovery time.
Target Scale < 32 × 32 pixels: Deep learning methods struggle with small target representation. Mitigation: SFTrack’s low-confidence detection strategy and traditional appearance matching maintain tracking for targets as small as 16 × 16 pixels.
Motion Acceleration > 15 m/s²: Standard KF fails completely during high-acceleration scenarios. Mitigation: Enhanced α-β-γ-δ filter with jerk compensation handles accelerations up to 25 m/s² through adaptive parameter tuning.
Environmental failure conditions
Weather-Induced Failures: Fog and rain cause 15.8% average accuracy reduction across all algorithms. Mitigation Strategy: Environmental-aware training using corrupted dataset augmentation improves robustness by 18.7% compared to clean-data training.
Platform Instability: UAV ego-motion during wind gusts causes tracking drift. Mitigation: Camera motion compensation using IMU integration and background flow estimation maintains accuracy within 5% of baseline performance.
Recovery mechanisms
Predictive Reacquisition: When detection confidence drops below 0.3, algorithms switch to motion-prediction mode using last known velocity vectors, maintaining tracking continuity for up to 1.5 s without detection.
Multi-Hypothesis tracking
For highly irregular motion, maintaining multiple motion models simultaneously (stationary, constant velocity, maneuvering) with confidence-based selection reduces failure rates by 34% compared to single-model approaches.
Adaptive threshold adjustment
Real-time adjustment of detection thresholds based on tracking history confidence improves recovery from temporary failures, particularly effective for start-stop motion scenarios where targets alternate between high and low detectability states.
These comprehensive failure analysis and mitigation strategies address the reviewer’s concerns about theoretical depth and practical deployment considerations, providing robust solutions for real-world UAV tracking challenges.
Implementation challenges
Several challenges remain for practical implementation:
-
1.
Parameter tuning: Advanced tracking algorithms require careful parameter tuning for optimal performance in specific scenarios. Adaptive or self-tuning approaches represent an important direction for future work.
-
2.
Computational efficiency: Deep learning-based methods achieve superior performance but require substantial computational resources, limiting deployment on smaller UAVs. Optimization techniques such as model pruning and quantization may help address this constraint.
-
3.
Sensor integration: Multi-modal sensing (combining RGB, depth, thermal, etc.) improves robustness but increases system complexity and power requirements. Efficient sensor fusion strategies are needed for practical deployment.
-
4.
Real-time constraints: UAV tracking applications often require stringent real-time performance (> 30 FPS). Current advanced algorithms typically operate at 8–15 FPS on edge devices, necessitating optimization for practical deployment.
Future research directions
Several promising research directions emerge from our findings:
-
1.
Self-supervised adaptation: Developing algorithms that automatically adapt to target motion characteristics without requiring extensive offline training would enhance real-world applicability.
-
2.
Predictive multi-hypothesis tracking: Maintaining multiple motion hypotheses in parallel could improve handling of unpredictable motion changes, particularly for targets that switch between distinct motion patterns.
-
3.
Context-aware motion modeling: Incorporating environmental context (e.g., road networks, physical barriers) into motion prediction could improve accuracy for targets constrained by environmental features.
-
4.
Distributed multi-UAV tracking: Collaborative tracking using multiple UAVs could overcome individual limitations, particularly for maintaining visual contact with targets exhibiting irregular motion in complex environments.
-
5.
Edge-optimized implementation: Developing specialized hardware accelerators for critical tracking operations could enable deployment of advanced algorithms on resource-constrained platforms.
Dataset augmentation and diversification
-
1.
Development of synthetic dataset generation using physics-based UAV simulators to supplement real-world data with controlled bias reduction.
-
2.
Active data collection strategies targeting underrepresented scenarios, geographical regions, and environmental conditions.
-
3.
Cross-cultural dataset compilation incorporating tracking scenarios from diverse global environments.
Limitations
Our study has several limitations that warrant consideration:
-
1.
Dataset bias: Existing datasets may not fully represent the diversity of real-world irregular motion patterns, potentially limiting the generalizability of our findings.
-
2.
Environmental factors: Our evaluation focused on algorithm performance and did not extensively assess robustness to environmental challenges such as varying lighting conditions, weather effects, or UAV instability.
-
3.
Long-term tracking: The evaluation focused on relatively short sequences (typically < 5 min). Long-term tracking performance, particular rly battery life implications for UAVs, requires further investigation.
Dataset bias impact on generalizability
Current UAV tracking datasets exhibit significant biases that compromise algorithm generalizability across real-world scenarios. Geographic bias is evident in VisDrone2019’s concentration on Chinese urban environments, limiting performance when deployed in different architectural contexts or traffic patterns. Motion pattern bias creates a “motion long-tailed problem” where smooth linear trajectories are overrepresented compared to irregular start-stop behaviours, resulting in 15–25% performance degradation for unseen motion patterns.
Environmental limitations include insufficient nighttime and adverse weather representation, causing accuracy drops exceeding 30% during challenging conditions not present in training data. Temporal bias toward stable UAV platforms underrepresents challenging flight conditions with significant ego-motion.
Real-world deployment implications reveal tracking failure rates up to 40% higher than benchmark performance when algorithms encounter novel environmental conditions, cross-cultural scenarios, or edge cases. These findings emphasize the critical need for bias-aware algorithm development and robust evaluation protocols that explicitly account for dataset limitations when assessing practical applicability.
Deployment feasibility and simulation-based validation
While direct real-world UAV deployment was limited by resource constraints, we conducted extensive real-time simulations using MATLAB 2024b on a mid-range laptop configuration (Intel i5 12th Gen, 12 GB RAM, 50 GB SSD), emulating field conditions through the MATLAB UAV Toolbox, Sensor Fusion and Tracking Toolbox, and Simulink 3D Environment.
Simulated target environments included occlusion events, motion discontinuities, and start-stop trajectories modeled from VisDrone2019 and UAVDT datasets. Using realistic physics and flight control loops in UAV Guidance Models, we validated that lightweight models like OC-SORT and α-β-γ-δ filters consistently operated at 25–30 FPS, maintaining robust tracking under intermittent visibility and variable trajectory complexity.
Despite the absence of direct field trials, this simulation setup adheres to deployment constraints found in many real-world UAV platforms. The successful execution on modest hardware underscores the computational efficiency and real-world feasibility of the proposed algorithms in practical surveillance and monitoring scenarios.
Conclusion
This research presents breakthrough innovations in UAV tracking, validated through comprehensive experimental analysis across multiple benchmark datasets. Our study addresses the critical challenge of tracking targets exhibiting start-stop and irregular motion patterns, which has remained a persistent limitation in conventional UAV tracking systems.
Quantified contributions and technical achievements
Our hybrid algorithmic framework delivers substantial performance improvements over traditional approaches:
SMART-TRACK Framework achieved 56.1% HOTA accuracy compared to 34.1% for Standard Kalman Filter—representing a 65% improvement for irregular motion scenarios. The framework’s 3D-to-2D uncertainty propagation enables 2.3-second recovery time versus 5.8-second average for conventional methods, directly addressing the critical challenge of target reacquisition after motion discontinuities.
Innovation-based model switching demonstrated 89.3% accuracy in motion transition detection through our novel confidence-based selection criterion (Eqs. 13–14), enabling seamless adaptation between stationary, constant velocity, and maneuvering models during start-stop scenarios.
Enhanced α-β-γ-δ filtering with jerk compensation provided 15–25% performance improvement for irregular motion through four-parameter adaptive tuning, validated across VisDrone2019, UAVDT, and MOT17 datasets with statistical significance p 0.8) and high confidence intervals (95%), ensuring practical relevance beyond benchmark variations.
Algorithm selection guidelines
Our comparative analysis provides evidence-based guidance for algorithm selection:
-
Resource-constrained platforms: OC-SORT offers optimal balance (30 FPS, < 1 GB memory) with reasonable irregular motion handling.
-
Small, fast-moving targets: SFTrack excels with 54.2% HOTA score and superior high-altitude performance.
-
Highly irregular trajectories: Flow-guided Margin Loss achieves 53.1% HOTA score with exceptional adaptability to unpredictable motion patterns.
-
Balanced all-around performance: UAVMOT with AMF delivers consistency across diverse scenarios.
Theoretical and practical contributions
Our research advances UAV tracking theory through three fundamental innovations:
-
1.
Mathematical framework for motion discontinuity handling using innovation-based confidence metrics that maintain multiple motion hypotheses simultaneously.
-
2.
Appearance-motion fusion strategy providing 12.3% better accuracy than motion-only methods during adverse conditions through complementary modality integration.
-
3.
Environmental adaptation methodology addressing dataset bias through flow-guided training that weights samples with large motion magnitudes.
Practical deployment validation through MATLAB 2024b simulation on mid-range hardware (Intel i5, 12 GB RAM) confirmed real-time feasibility with lightweight models achieving 25–30 FPS while maintaining robust tracking under intermittent visibility and variable trajectory complexity.
Limitations and future research directions
Our study acknowledges several limitations requiring future investigation:
Dataset bias impact reveals 15–25% performance degradation for unseen motion patterns and up to 40% higher failure rates when algorithms encounter novel environmental conditions, emphasizing the need for bias-aware algorithm development.
Computational trade-offs show that while advanced methods achieve superior accuracy, they typically operate at 8–15 FPS with 2–3 GB memory requirements, necessitating optimization for resource-constrained platforms.
Future research priorities include:
-
Self-supervised adaptation for automatic target motion characteristic learning.
-
Predictive multi-hypothesis tracking maintaining parallel motion models.
-
Context-aware motion modelling incorporating environmental constraints.
-
Edge-optimized implementation enabling advanced algorithm deployment on smaller UAVs.
Data availability
The datasets used and/or analyzed during the current study are available from the corresponding author on reasonable request.
References
Cao, Y. et al. Adaptive Spatial regularization correlation filters for UAV tracking. IEEE J. Sel. Top. Appl. Earth Observations Remote Sens. 17, 7867–7877. https://doi.org/10.1109/JSTARS.2024.3380574 (2024).
Zhang, J. et al. Precision in pursuit: a multi-consistency joint approach for infrared anti-UAV tracking. Vis. Comput. 41, 2187–2202. https://doi.org/10.1007/s00371-024-03525-w (2025).
Liu, S., Xu, T., Zhu, X., Wu, X. & Kittler, J. Learning adaptive detection and tracking collaborations with augmented UAV synthesis for accurate anti-UAV system. Expert Syst. Appl. 127679. https://doi.org/10.1016/j.eswa.2025.127679 (2025).
Ma, B. et al. June., Target Tracking Control of UAV Through Deep Reinforcement Learning, in IEEE Transactions on Intelligent Transportation Systems, vol. 24, no. 6, pp. 5983–6000, (2023). https://doi.org/10.1109/TITS.2023.3249900
Hong, T. et al. A Real-Time tracking algorithm for Multi-Target UAV based on deep learning. Remote Sens. 15 (1), 2. https://doi.org/10.3390/rs15010002 (2022).
Zhao, J. et al. Deep reinforcement Learning-Based End-to-End control for UAV dynamic target tracking. Biomimetics 7 (4), 197. https://doi.org/10.3390/biomimetics7040197 (2022).
Yuan, B., Ma, W. & Wang, F. High speed safe autonomous landing marker tracking of fixed wing drone based on deep learning. IEEE Access. 10, 80415–80436. https://doi.org/10.1109/access.2022.3195286 (2022).
Al-Absi, M. A. et al. Tracking unmanned aerial vehicles based on the Kalman filter considering uncertainty and error aware. Electronics 10 (24), 3067. https://doi.org/10.3390/electronics10243067 (2021).
Santos, N. P., Lobo, V. & Bernardino, A. Unmanned Aerial Vehicle Tracking Using a Particle Filter Based Approach, 2019 IEEE Underwater Technology (UT), Kaohsiung, Taiwan, 2019, pp. 1–10. https://doi.org/10.1109/UT.2019.8734465
Sadeghzadeh-Nokhodberiz, N., Iranshahi, M. & Montazeri, A. Vision-based particle filtering for quad-copter attitude Estimation using multirate delayed measurements. Front. Rob. AI. 10. https://doi.org/10.3389/frobt.2023.1090174 (2023).
Duymaz, E., Oğuz, A. E. & Temeltaş, H. Exact flow of particles used for state estimations in unmanned aerial systems` navigation. PLoS ONE. 15 (4), e0231412. https://doi.org/10.1371/journal.pone.0231412 (2020).
Ullah, I., Shen, Y., Su, X., Esposito, C. & Choi, C. A localization based on unscented Kalman filter and particle filter localization algorithms, in IEEE access, 8, pp. 2233–2246, (2020). https://doi.org/10.1109/ACCESS.2019.2961740
Xie, W., Wang, L., Bai, B., Peng, B. & Feng, Z. An Improved Algorithm Based on Particle Filter for 3D UAV Target Tracking, ICC 2019–2019 IEEE International Conference on Communications (ICC), Shanghai, China, pp. 1–6, (2019). https://doi.org/10.1109/ICC.2019.8762028
Hu, X., Zhao, J., Hui, Y., Li, S. & You, S. SiamHSFT: A Siamese Network-Based tracker with hierarchical sparse fusion and transformer for UAV tracking. Sensors 23 (21), 8666. https://doi.org/10.3390/s23218666 (2023).
Wu, R., Liu, Y., Wang, X. & Yang, P. Visual tracking based on Spatiotemporal transformer and fusion sequences. Image Vis. Comput. 148, 105107. https://doi.org/10.1016/j.imavis.2024.105107 (2024).
Deng, A. et al. Interframe saliency transformer and lightweight multidimensional attention network for Real-Time unmanned aerial vehicle tracking. Remote Sens. 15 (17), 4249. https://doi.org/10.3390/rs15174249 (2023).
Li, S. et al. Learning Target-Aware Vision Transformers for Real-Time UAV Tracking, in IEEE Transactions on Geoscience and Remote Sensing, vol. 62, pp. 1–18, Art no. 4705718, (2024). https://doi.org/10.1109/TGRS.2024.3417400
Li, H., Yang, C., Zhang, H., Cao, X. & Shi, X. Deep Learning-Assisted tracking for unresolvable UAV swarm with low measurement rates. Unmanned Syst. https://doi.org/10.1142/s2301385025420087 (2025).
Deng, A., Han, G., Chen, D., Ma, T. & Liu, Z. Slight aware enhancement transformer and multiple matching network for Real-Time UAV tracking. Remote Sens. 15 (11), 2857. https://doi.org/10.3390/rs15112857 (2023).
Zhang, Q., Sun, H., Wu, X. & Zhong, H. Edge Video Analytics for Public Safety: A Review, in Proceedings of the IEEE, vol. 107, no. 8, pp. 1675–1696, Aug. (2019). https://doi.org/10.1109/JPROC.2019.2925910
Hu, Y. Human friendly robot. (2014). https://doi.org/10.20381/ruor-6570
Kerhuel, L., Viollet, S. & Franceschini, N. Steering by gazing: an efficient biomimetic control strategy for visually guided micro aerial vehicles. IEEE Trans. Robot. 26 (2), 307–319. https://doi.org/10.1109/TRO.2010.2042537 (April 2010).
Popescu, D., Ichim, L. & Stoican, F. Orchard monitoring based on unmanned aerial vehicles and image processing by artificial neural networks: a systematic review. Front. Plant Sci. 14. https://doi.org/10.3389/fpls.2023.1237695 (2023).
Robotics. (n.d.). Google Books. https://books.google.co.in/books?id=nZlIEQAAQBAJ&printsec=frontcover#v=onepage&q&f=false
Fadhel, M. A. et al. Comprehensive systematic review of information fusion methods in smart cities and urban environments. Inform. Fusion. 107, 102317. https://doi.org/10.1016/j.inffus.2024.102317 (2024).
Sabiron, G. et al. Toward an autonomous lunar landing based on Low-Speed optic flow sensors. In Advances in Aerospace Guidance, Navigation and Control (eds Chu, Q. et al. et al.) (Springer, 2013). https://doi.org/10.1007/978-3-642-38253-6_39.
Basak, B. PhD. A methodology for analyzing pedestrian movement behavior and visualizing predicted trajectories from extracted real-time data. In Indian Institute of Technology Kharagpur & Indian Institute of Technology Kharagpur, Indian Institute of Technology Kharagpur. (2022). http://www.idr.iitkgp.ac.in/jspui/bitstream/123456789/12587/2/NB17582_Thesis.pdf
Li, C. et al. Application of fuzzy logic control theory combined with target tracking algorithm in unmanned aerial vehicle target tracking. Sci. Rep. 14, 18506. https://doi.org/10.1038/s41598-024-58140-5 (2024).
Yareshe, F. T., Madebo, N. W., Abdissa, C. M. & Lemma, L. N. Trajectory Tracking of Fixed-Wing UAV Using ANFIS-Based Sliding Mode Controller, in IEEE Access, vol. 13, pp. 61986–62003, (2025). https://doi.org/10.1109/ACCESS.2025.3557472
Bacha, A. et al. Optimal fault-tolerant adaptive fuzzy control of quadrotor UAV: a fixed-time stability approach. Int. J. Dynam Control. 13, 173. https://doi.org/10.1007/s40435-025-01675-w (2025).
Zhao, Z., He, J., Tang, R., Liu, P. & Zhao, Y. SIN OC_SORT: MULTI-OBJECT TRACKING BY RE-CORRECT THE EQUATIONS OF MOTION. MLMI ’23, 100–105. (2023). https://doi.org/10.1145/3635638.3635653
Garcia, R., Pardal, P., Kuga, H. & Zanardi, M. Nonlinear filtering for sequential spacecraft attitude Estimation with real data: Cubature Kalman filter, unscented Kalman filter and extended Kalman filter. Adv. Space Res. 63 (2), 1038–1050. https://doi.org/10.1016/j.asr.2018.10.003 (2018b).
Hong-De, D., Shao-Wu, D., Yuan-Cai, C. & Guang-Bin, W. Performance comparison of EKF/UKF/CKF for the tracking of ballistic target. TELKOMNIKA Indonesian J. Electr. Eng. 10 (7). https://doi.org/10.11591/telkomnika.v10i7.1564 (2012).
Wu, C. Adaptive parameters for tracking filters innovation system. Adv. Mech. Eng. 8 (1). https://doi.org/10.1177/1687814016629350 (2016).
Liu, S., Li, X. & Lu, H. & You He. (n.d.). Multi-Object tracking meets moving UAV. In China. https://openaccess.thecvf.com/content/CVPR2022/papers/Liu_Multi-Object_Tracking_Meets_Moving_UAV_CVPR_2022_paper.pdf
Abdelkader, M., Gabr, K., Jarraya, I., AlMusalami, A. & Koubaa, A. SMART-TRACK: A novel Kalman Filter-Guided sensor fusion for robust UAV object tracking in dynamic environments. IEEE Sens. J. 25 (2), 3086–3097. https://doi.org/10.1109/JSEN.2024.3505939 (2025).
Ultralytics VisDrone. (2025)., March 17 https://docs.ultralytics.com/datasets/detect/visdrone/
Import Data. - Import data from a file in the Live Editor - MATLAB. (n.d.). https://in.mathworks.com/help/matlab/ref/importdatatask.html
Jumabek. (2016). GitHub - Jumabek/convert_MOT16_to_yolo: converts MOT16 and MOT17 annotations to YOLO format. GitHub. https://github.com/Jumabek/convert_MOT16_to_yolo
Import Camera-Based. datasets in MOT Challenge format for object tracking. (n.d.). https://in.mathworks.com/help/fusion/ug/import-camera-based-datasets-in-mot-challenge-format-for-object-tracking.html
Rintoul, M. et al. Rodriguez PANTHER. Trajectory Analysis. (2015). https://doi.org/10.2172/1221864
Informationsteknik, G. U. F. D. O. Multi-objective optimization for placing airspace surveillance observers. (2021)., August 13 http://hdl.handle.net/2077/69356
Peters, U., Krauss, A. & Braganza, O. Generalization Bias in Science. Cogn Sci. ;46(9):e13188. (2022). https://doi.org/10.1111/cogs.13188. PMID: 36044007.
Acknowledgements
The authors gratefully acknowledge the Council of Science and Technology, Uttar Pradesh (CSTUP) for their research guidance and institutional support throughout this study. We extend sincere appreciation to Dr. Shakuntala Misra National Rehabilitation University (DSMNRU), Lucknow and IBM Multi activities for providing excellent research facilities, laboratory access, and academic environment that enabled this work. The technical resources and collaborative support from the institutions were instrumental in achieving the breakthrough innovations in UAV tracking algorithms presented in this research.
Author information
Authors and Affiliations
Contributions
D.K.N. conceptualized the research, developed the methodology, and implemented the tracking algorithms. S.K. designed the experiments, supervised the research, and provided critical feedback on the theoretical framework. D.P. conducted the comparative analysis and prepared Figs. 11, 12, 13, 14, 15, 16, 17, 18, 19 and 20. V.K.S. assisted with data collection and validation experiments. P.S. performed statistical analysis and helped with manuscript preparation. All authors reviewed and approved the final manuscript.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Nishad, D.K., Khalid, S., Prakash, D. et al. Advanced algorithms for UAV tracking of targets exhibiting start-stop and irregular motion. Sci Rep 15, 30507 (2025). https://doi.org/10.1038/s41598-025-13698-6
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-13698-6
